
Henry Quach
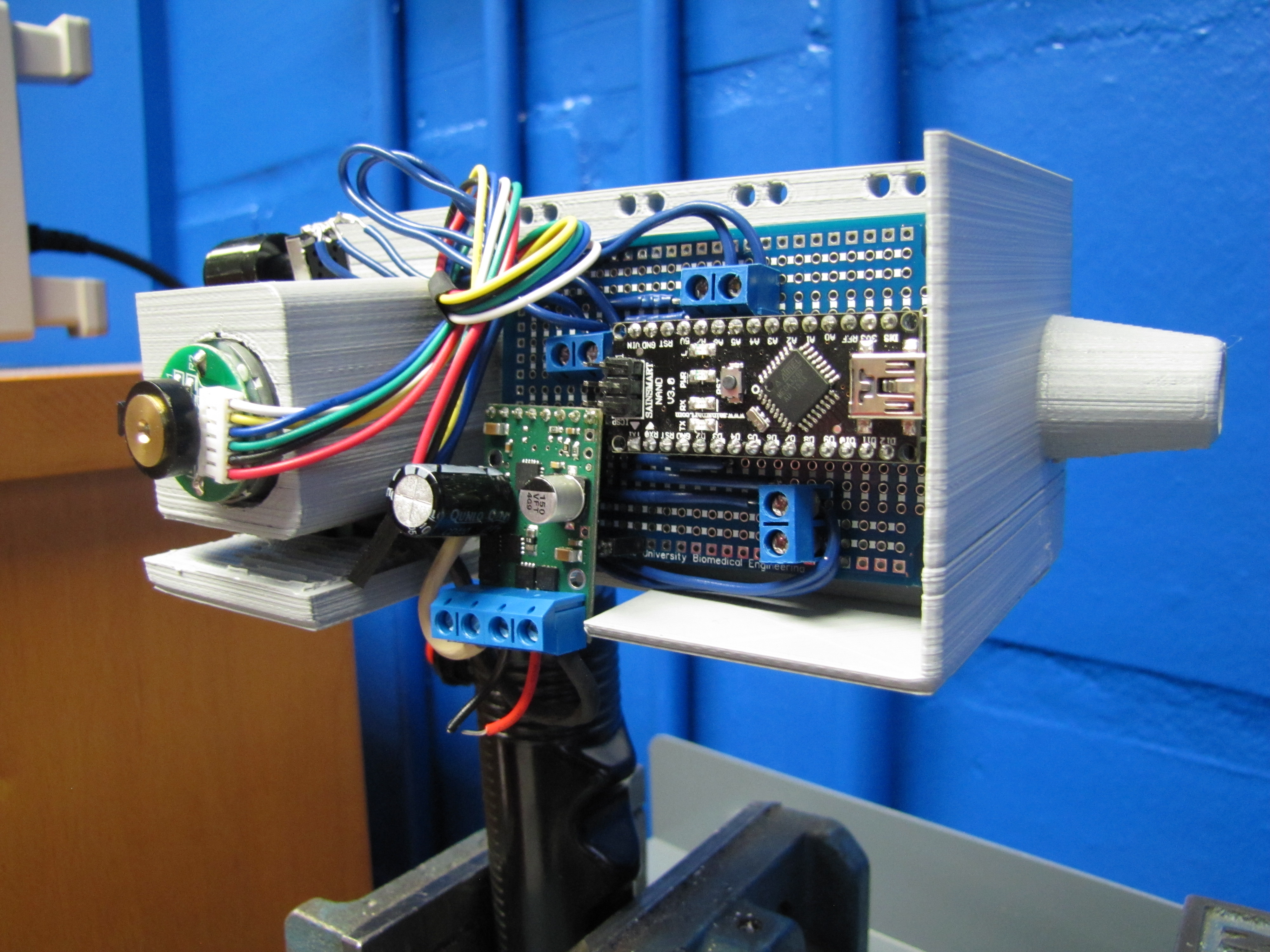
Mechanical EngineerMotorized Laparoscopic Tool
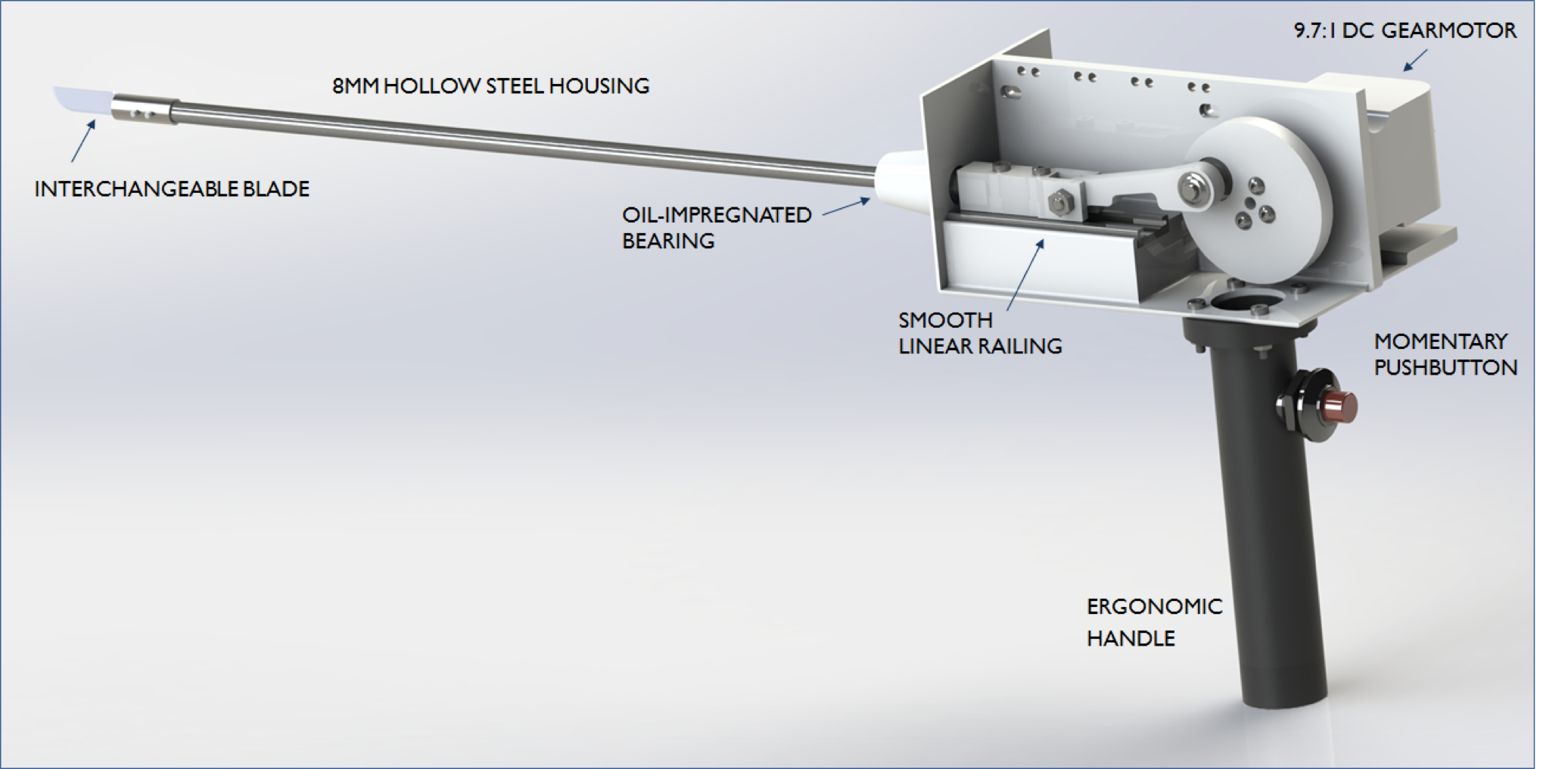
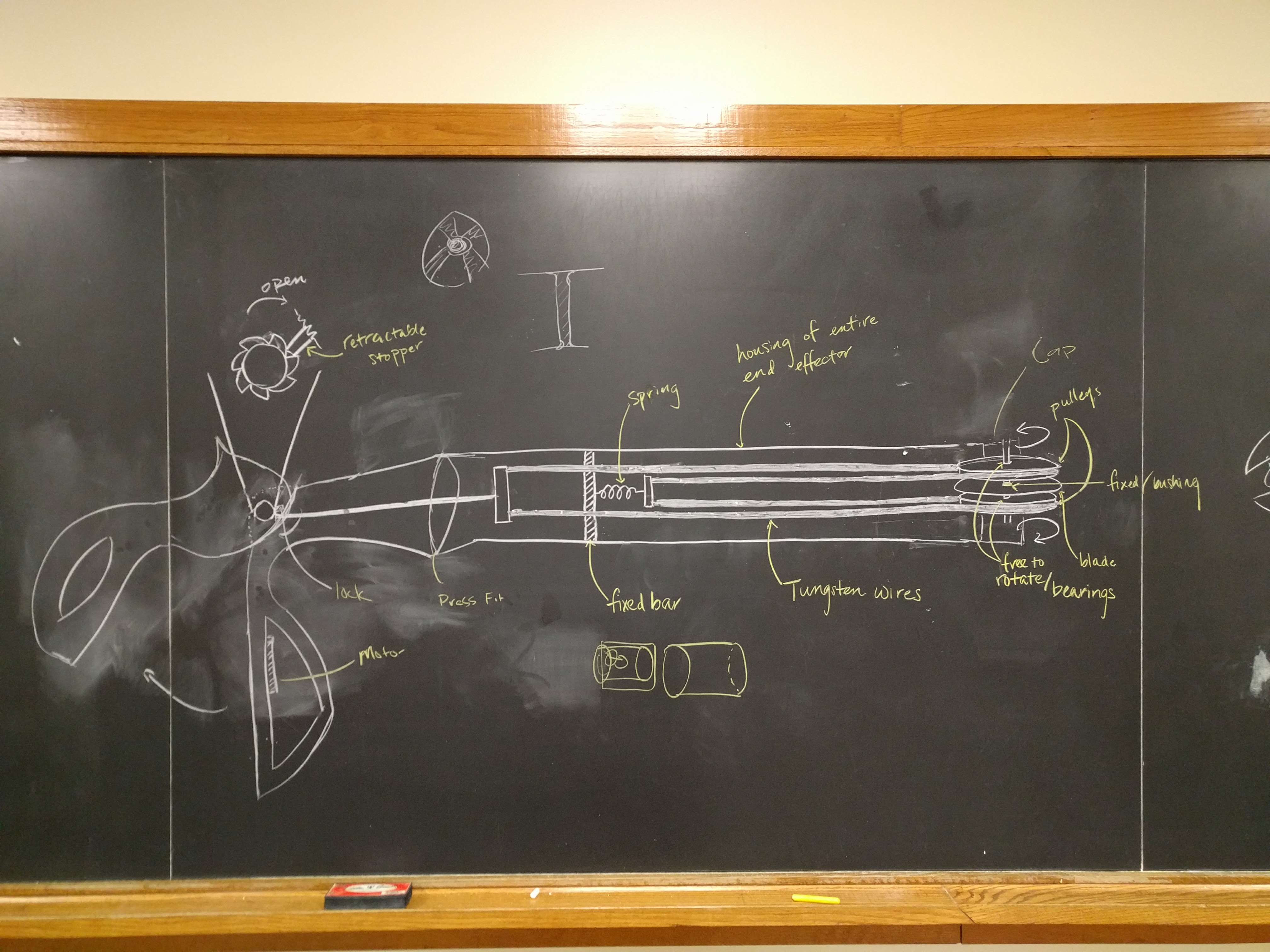
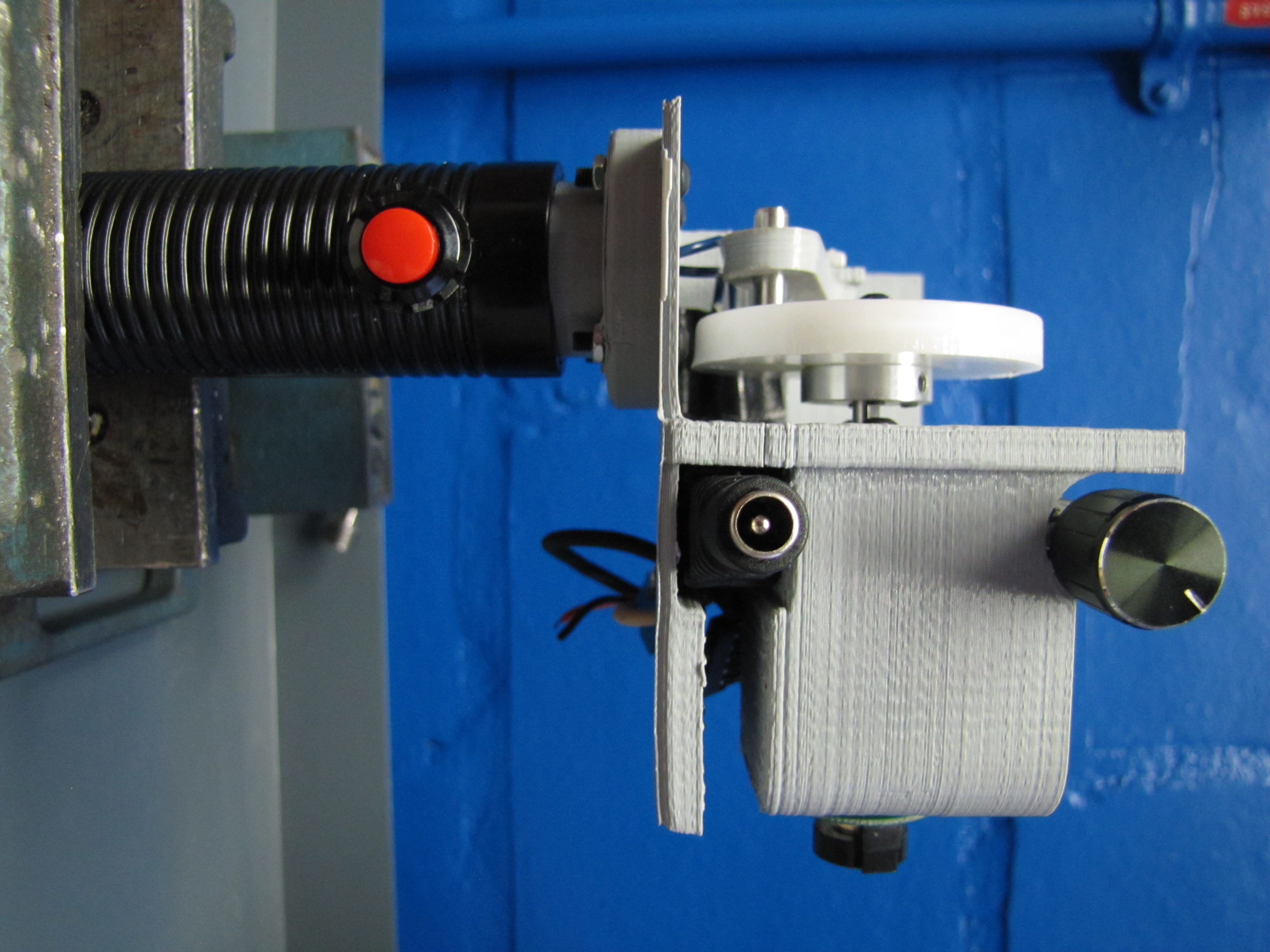
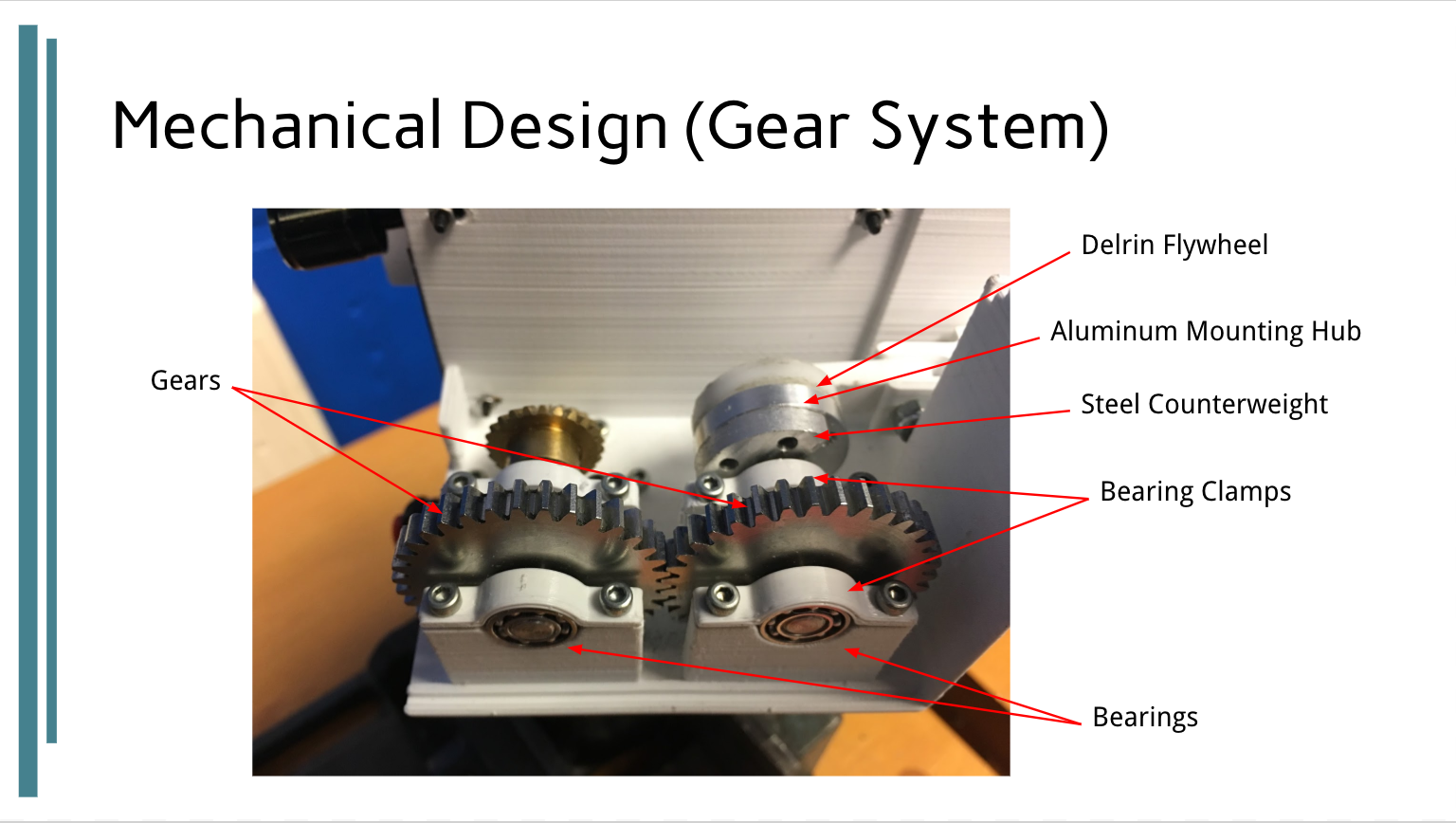
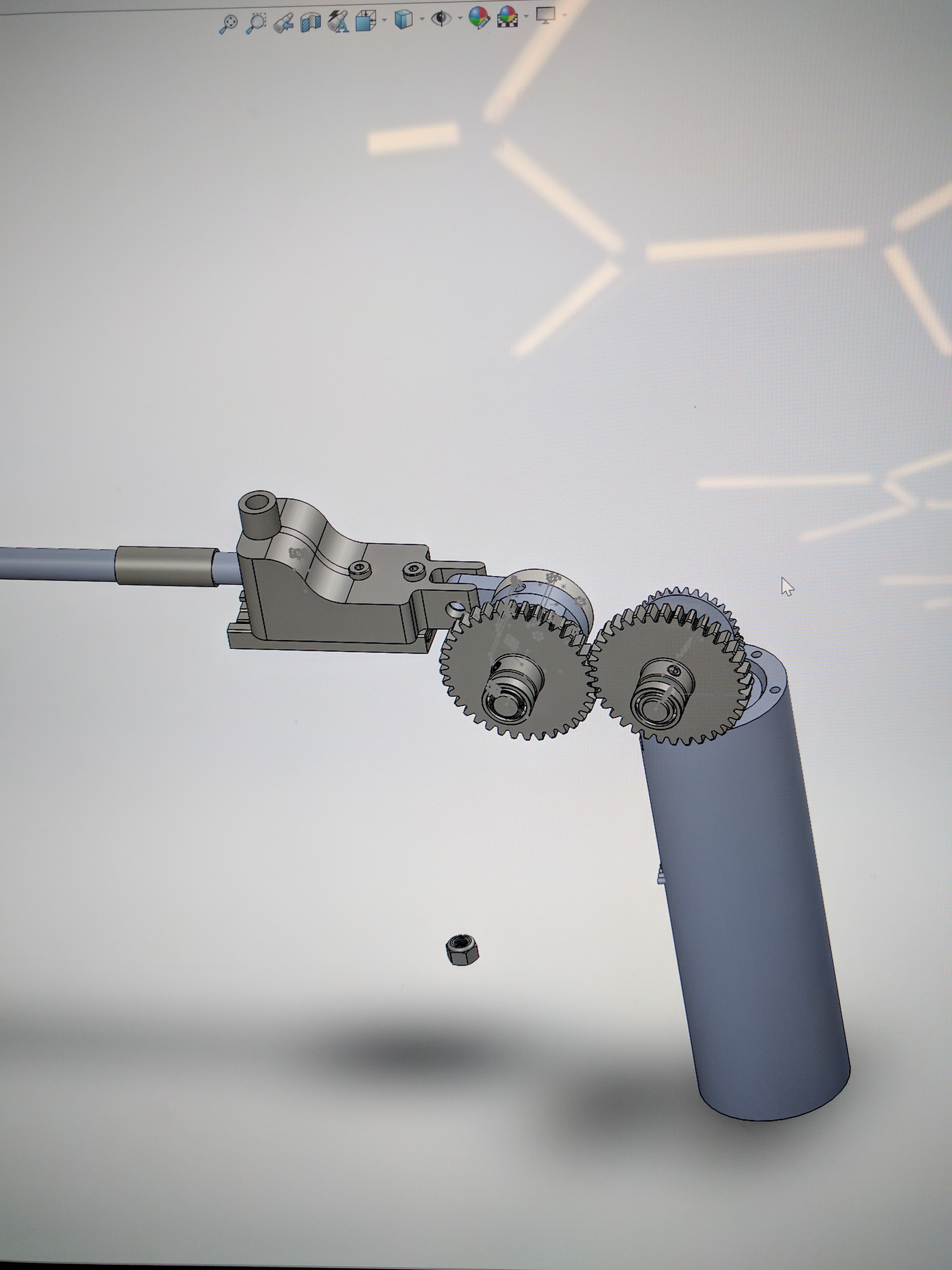
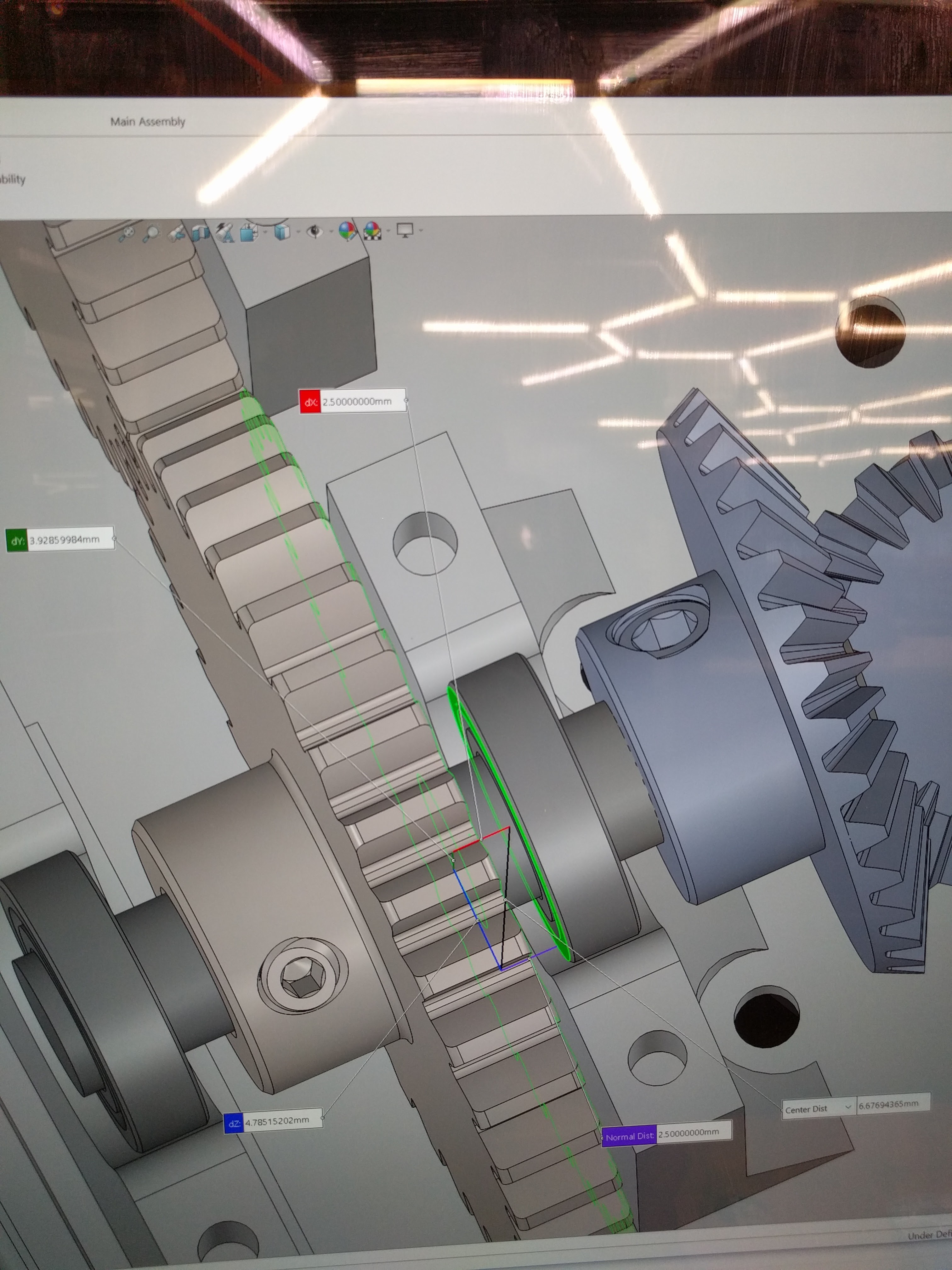
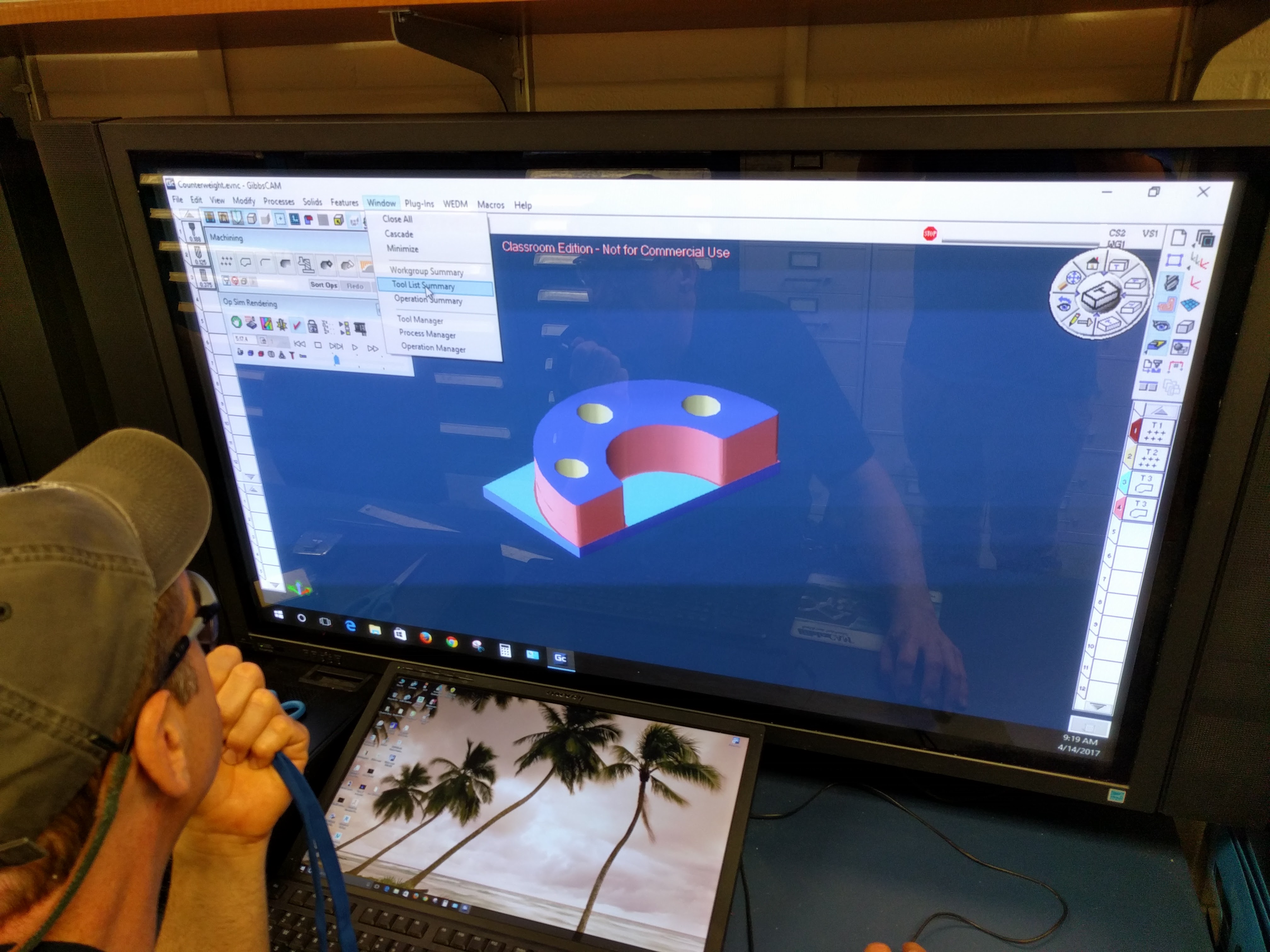
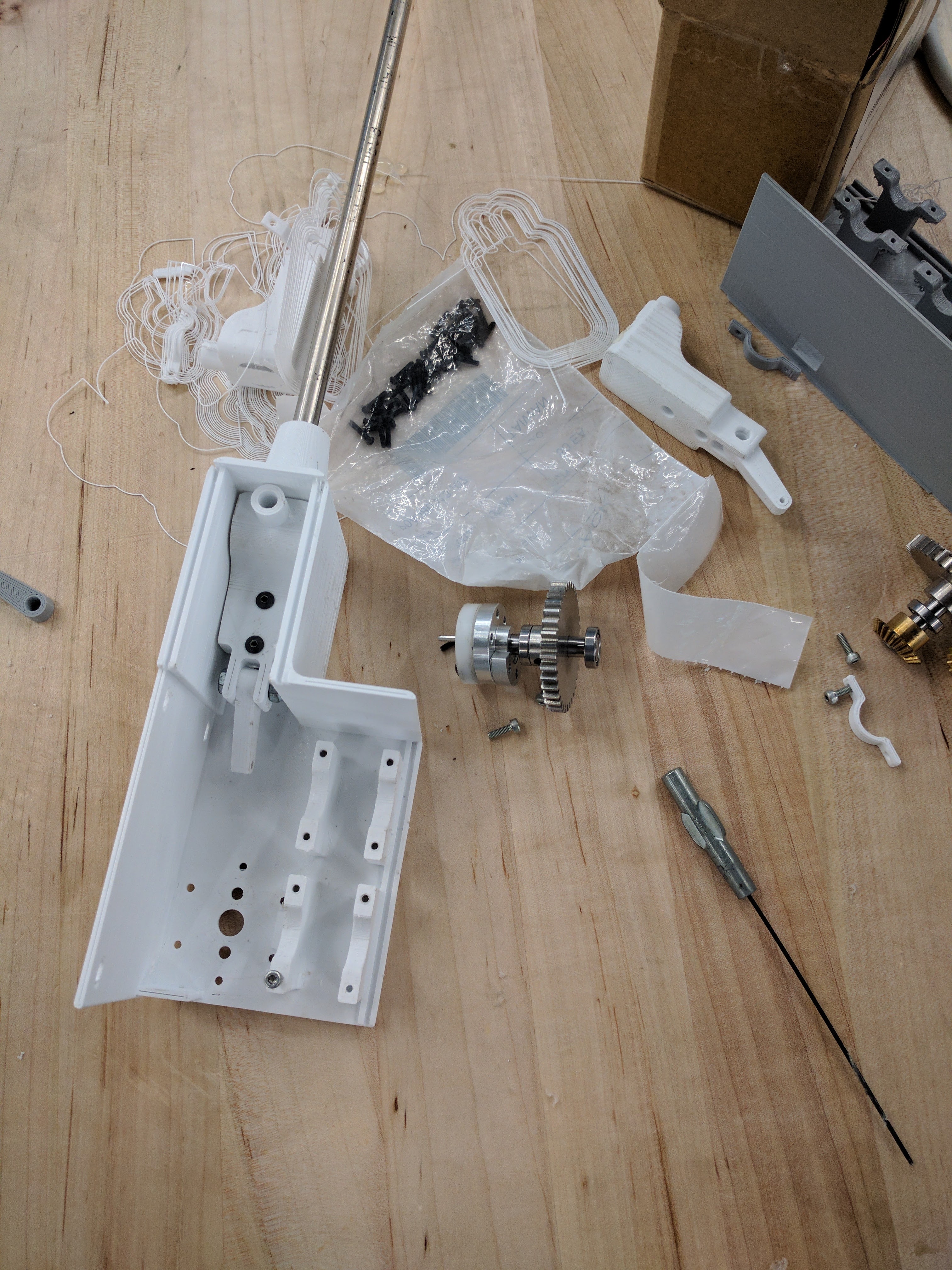
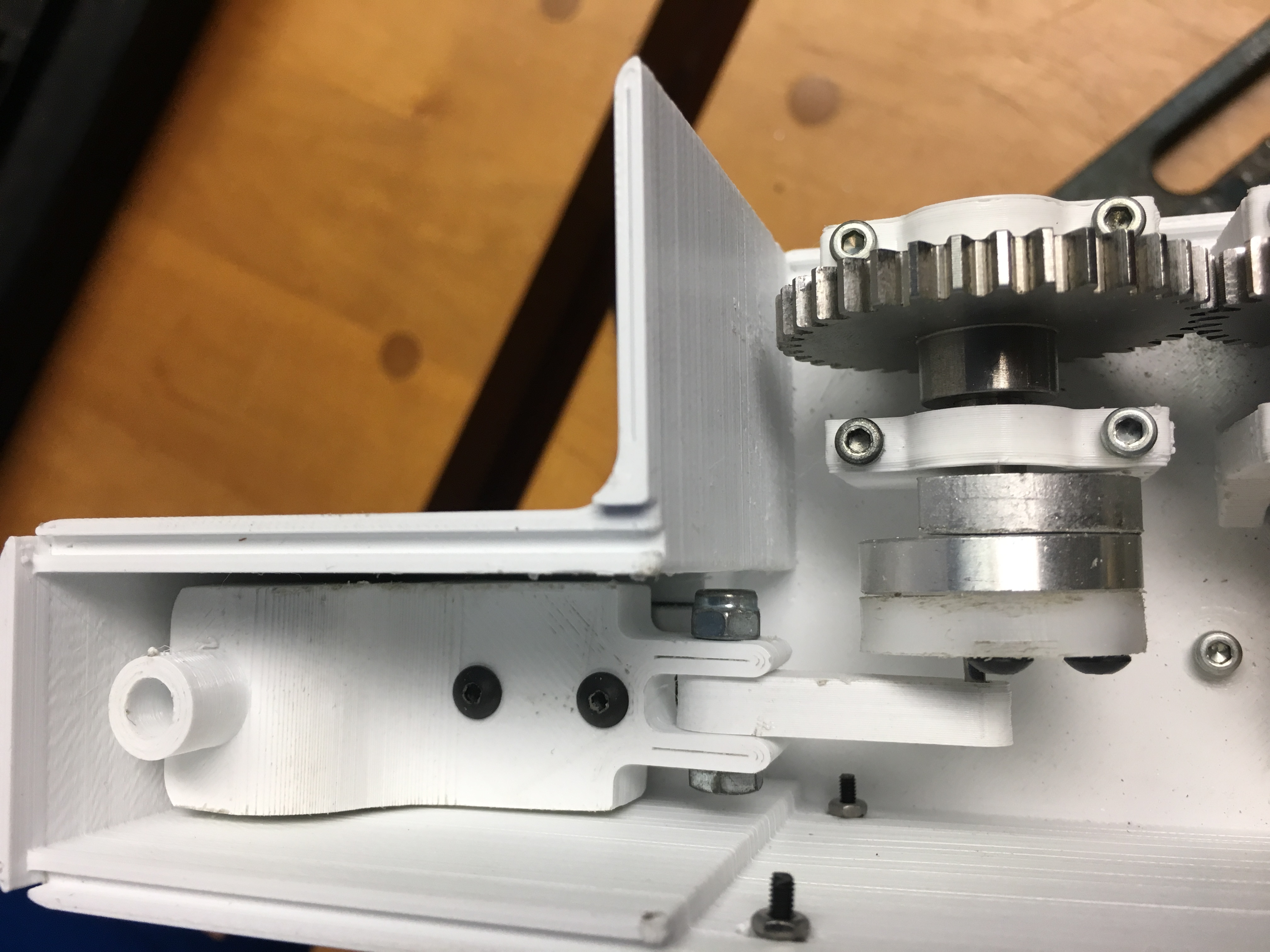
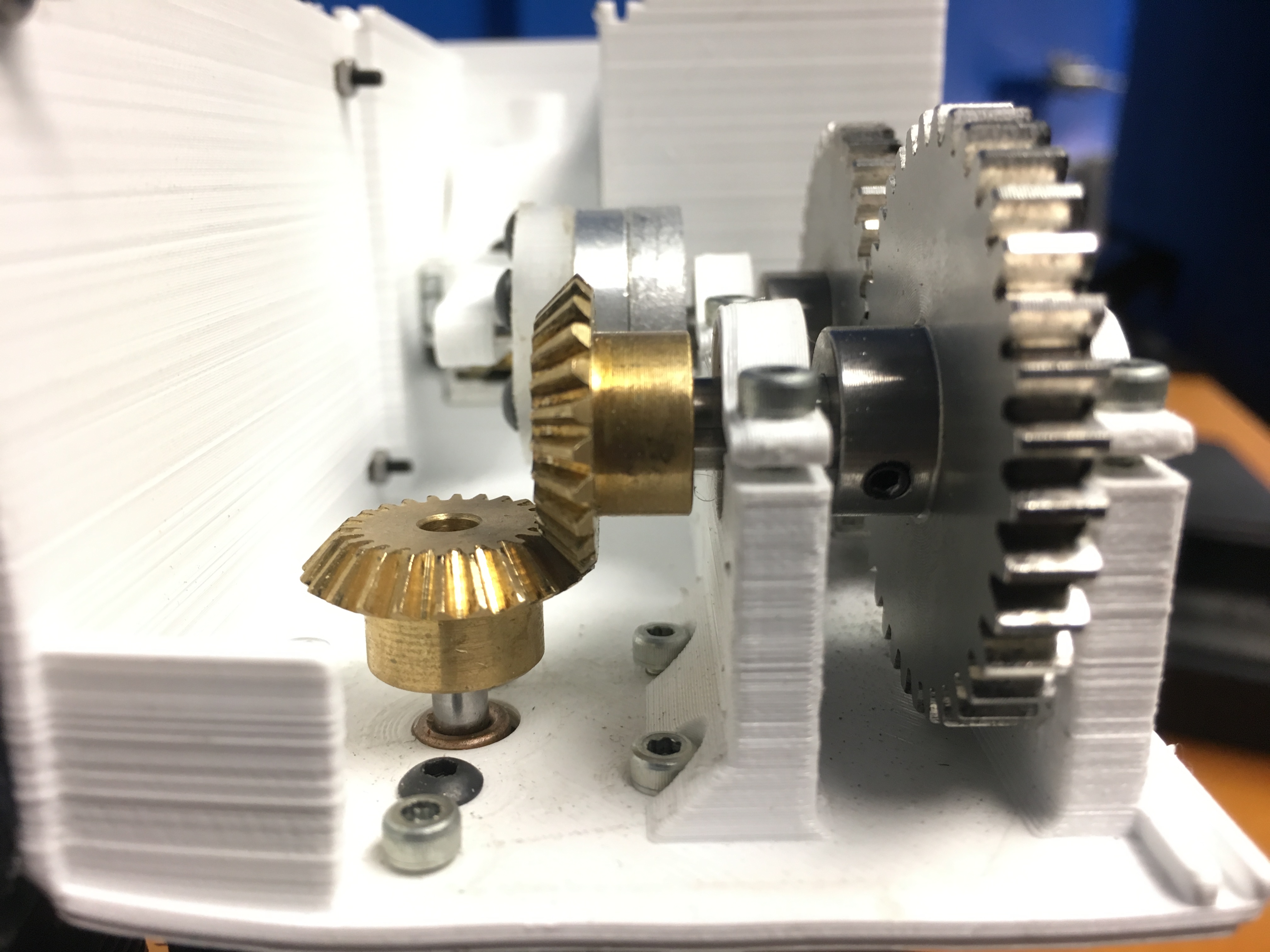
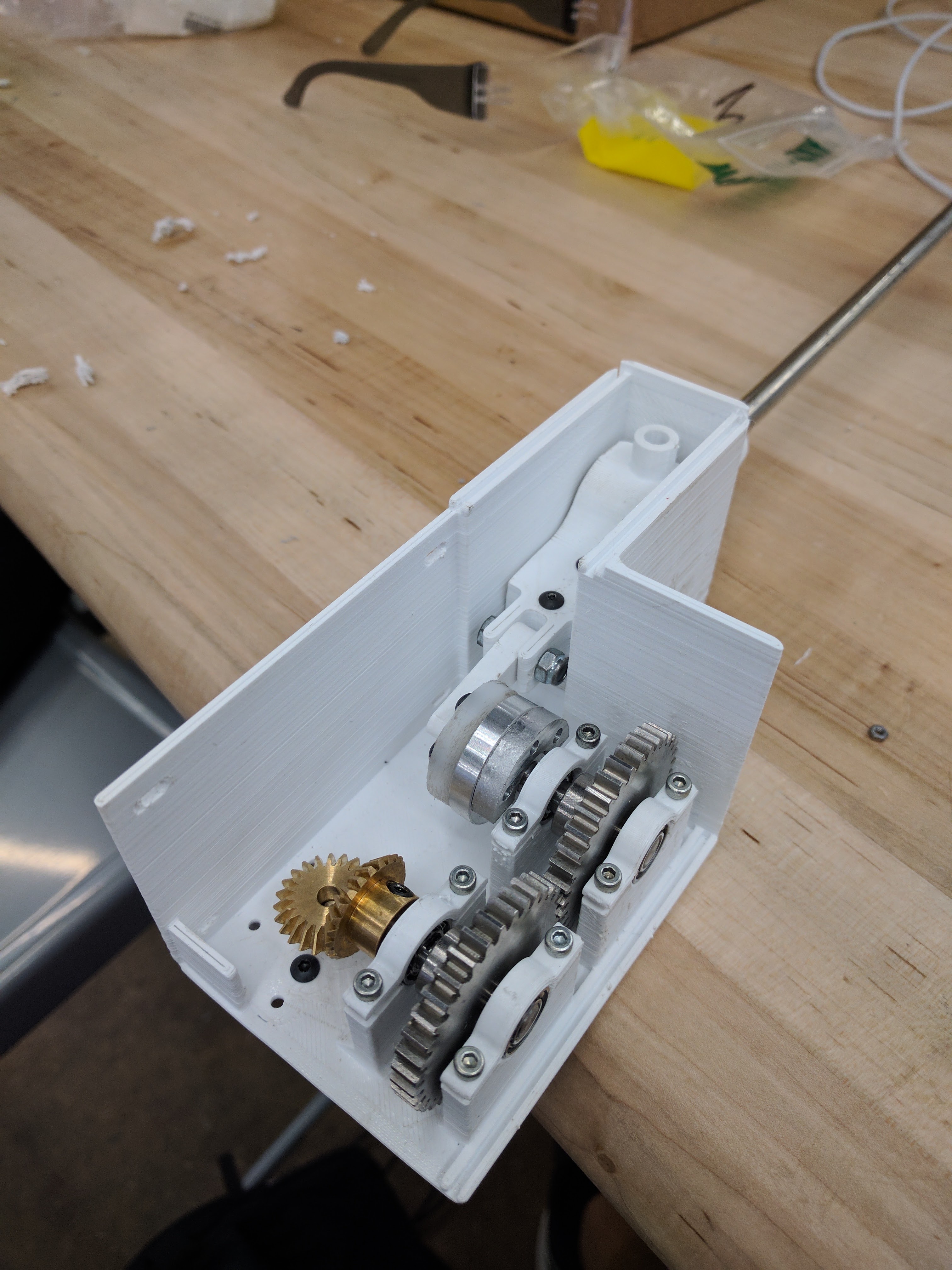
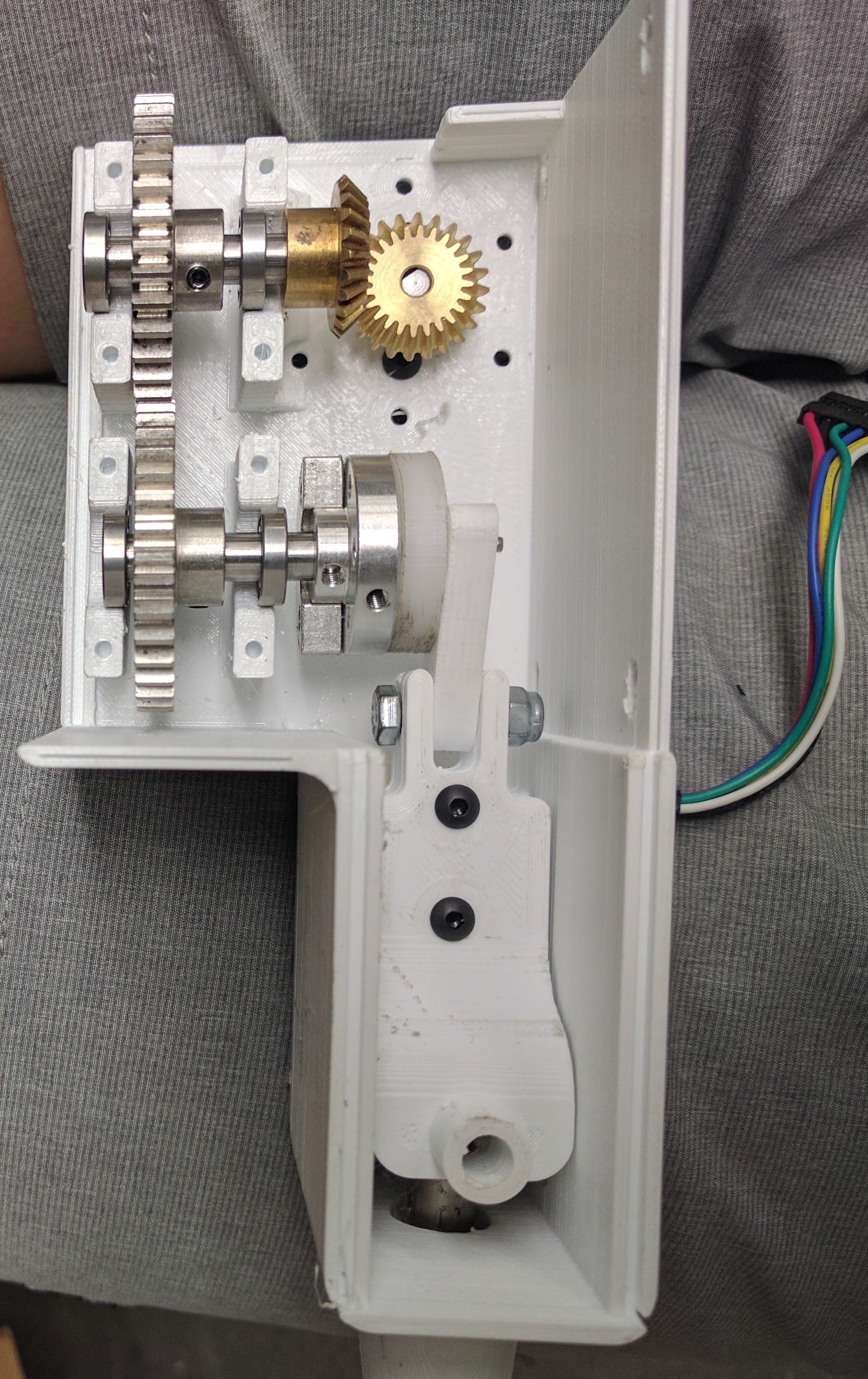
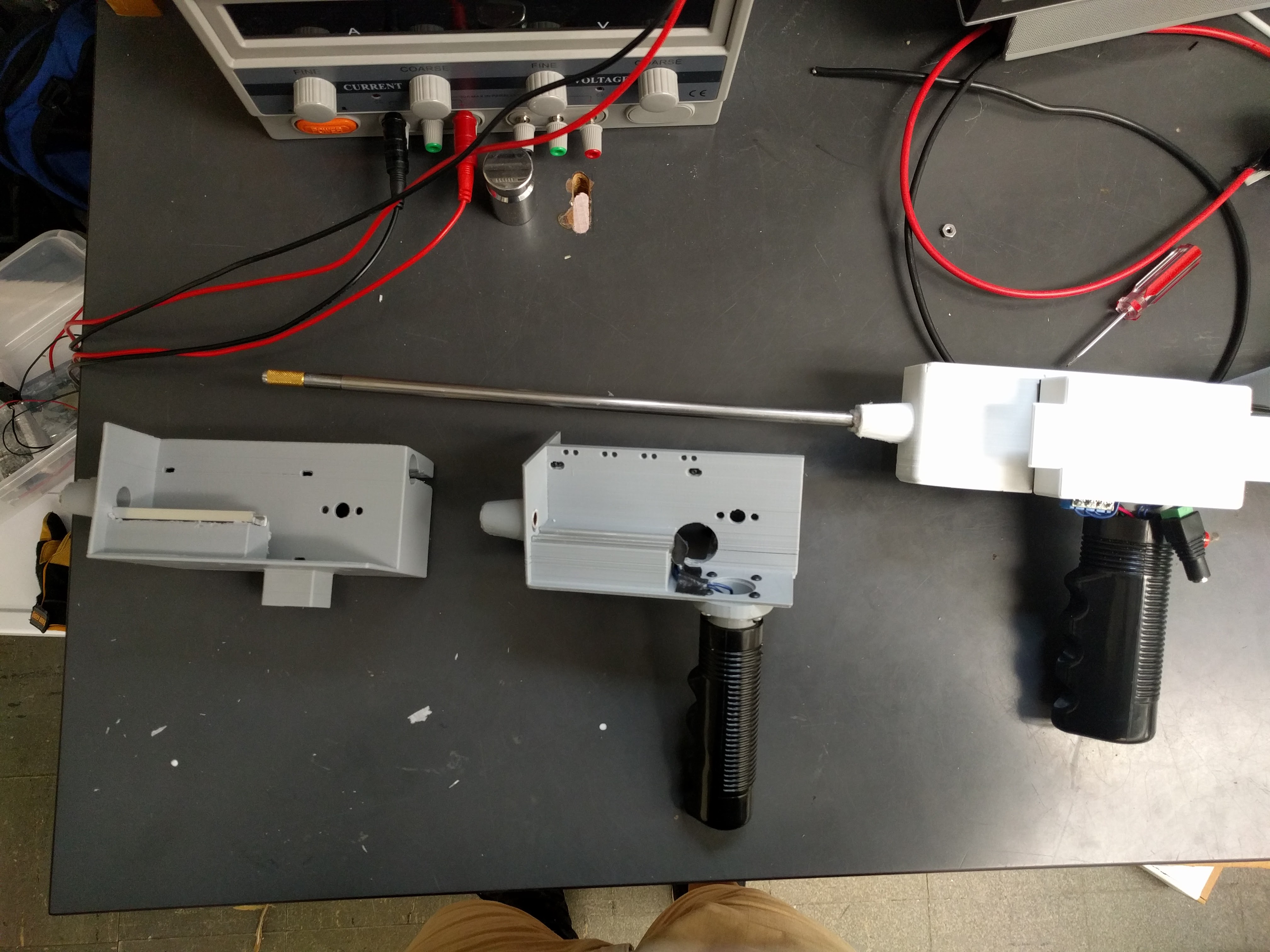
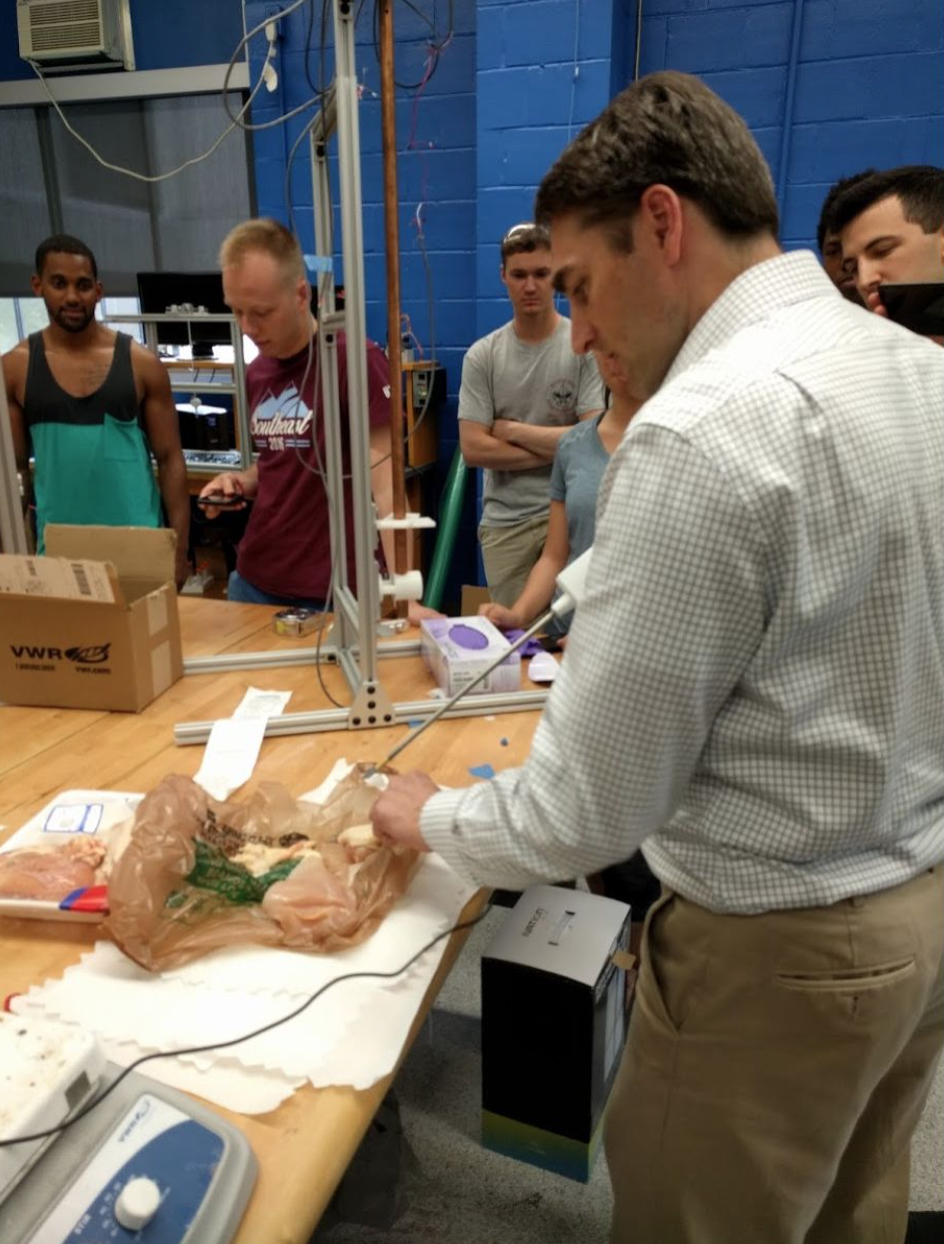
During laparoscopic partial nephrectomy procedures, one common problem that surgeons face is the removal of adherent sticky fat from the kidney. While non-sticky perinephric fat can be peeled using traditional methods such as manual shearing and electrocautery, adherent perinephric fat (APF) is attached to the kidney capsule at multiple points, making separation difficult. The current technology used for separation involves shearing the fat with scissor-like endoshears. Our team sought to design a novel tool that could shear APF in a more effective manner, yet remain in the 8 mm physical window for MIS.
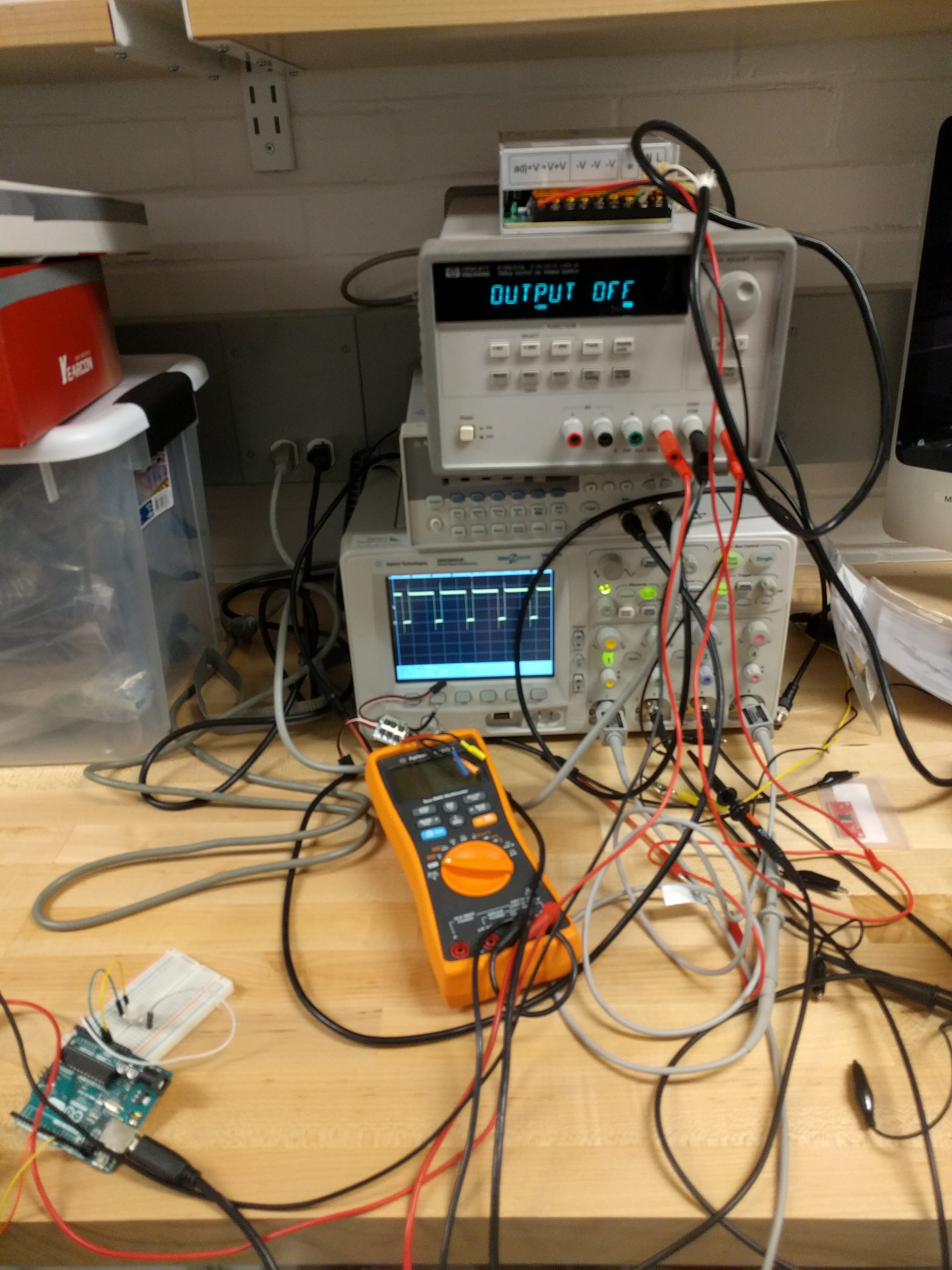
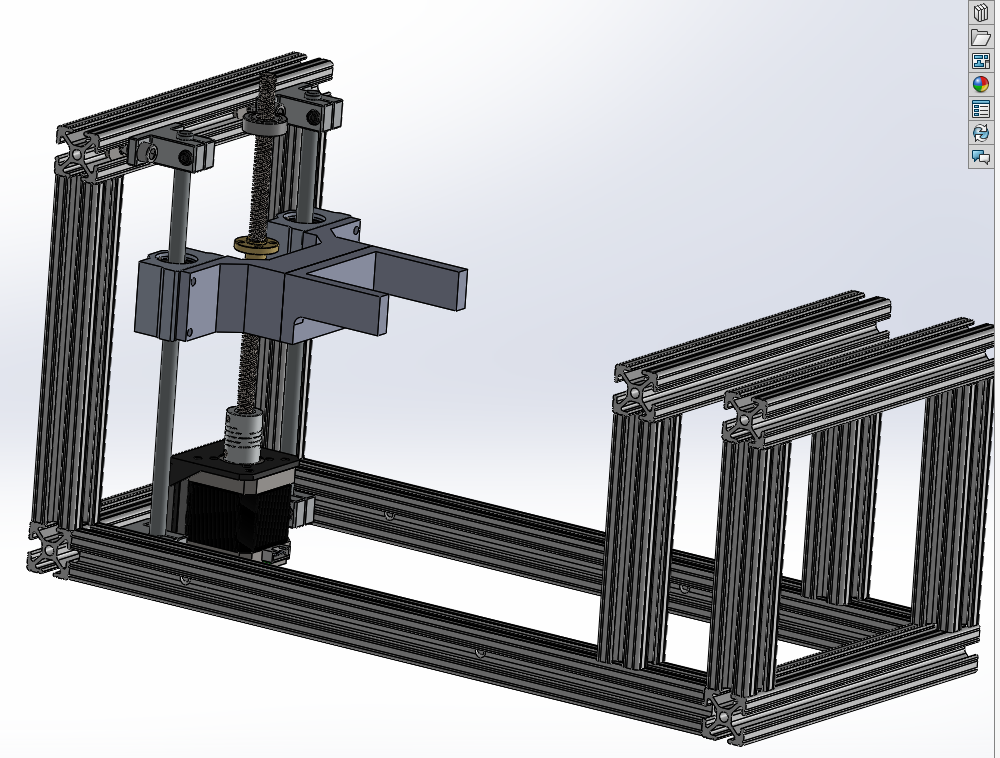
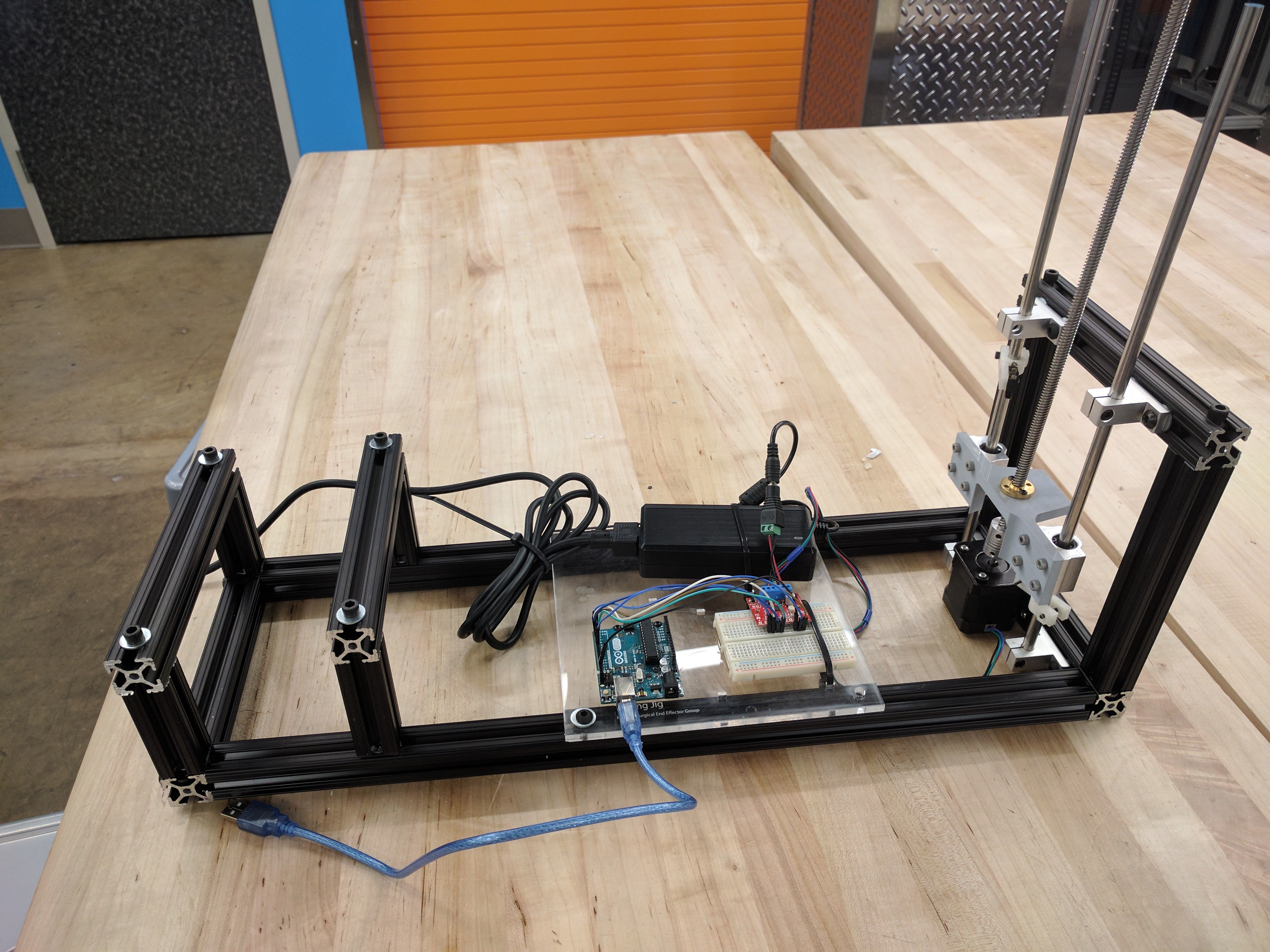
The objectives for the design are to 1. Create an effective motorized design solution to cut APF quickly in a one-handed operation without the use of electrocautery 2. Keep within the 8 mm standard window in manual laparoscopic surgery to allow for the device to fit comfortably through a trocar 3. Design an experiment to determine the effectiveness of different blade designs and oscillation speeds to optimize shearing ability 4. Compare shearing efficiency of our design to existing technologies on the market to establish a baseline for future development.
Timeline: Jan 2017 - May 2017
Team Members: Sachin Govil, Tim Kulesza, Henry Quach, Jasmine Tsai
Advisors: Walter Neal Simmons, Ph.D; Michael Ferrandino, MD; Jay Woodard, Intuitive Surgical
Key Words: Machine Design, Telemetry











Project Sponsors
Department Sponsors
