
Henry Quach
Mechanical EngineerNOAA Deep Sea Chemical Plume Tracker
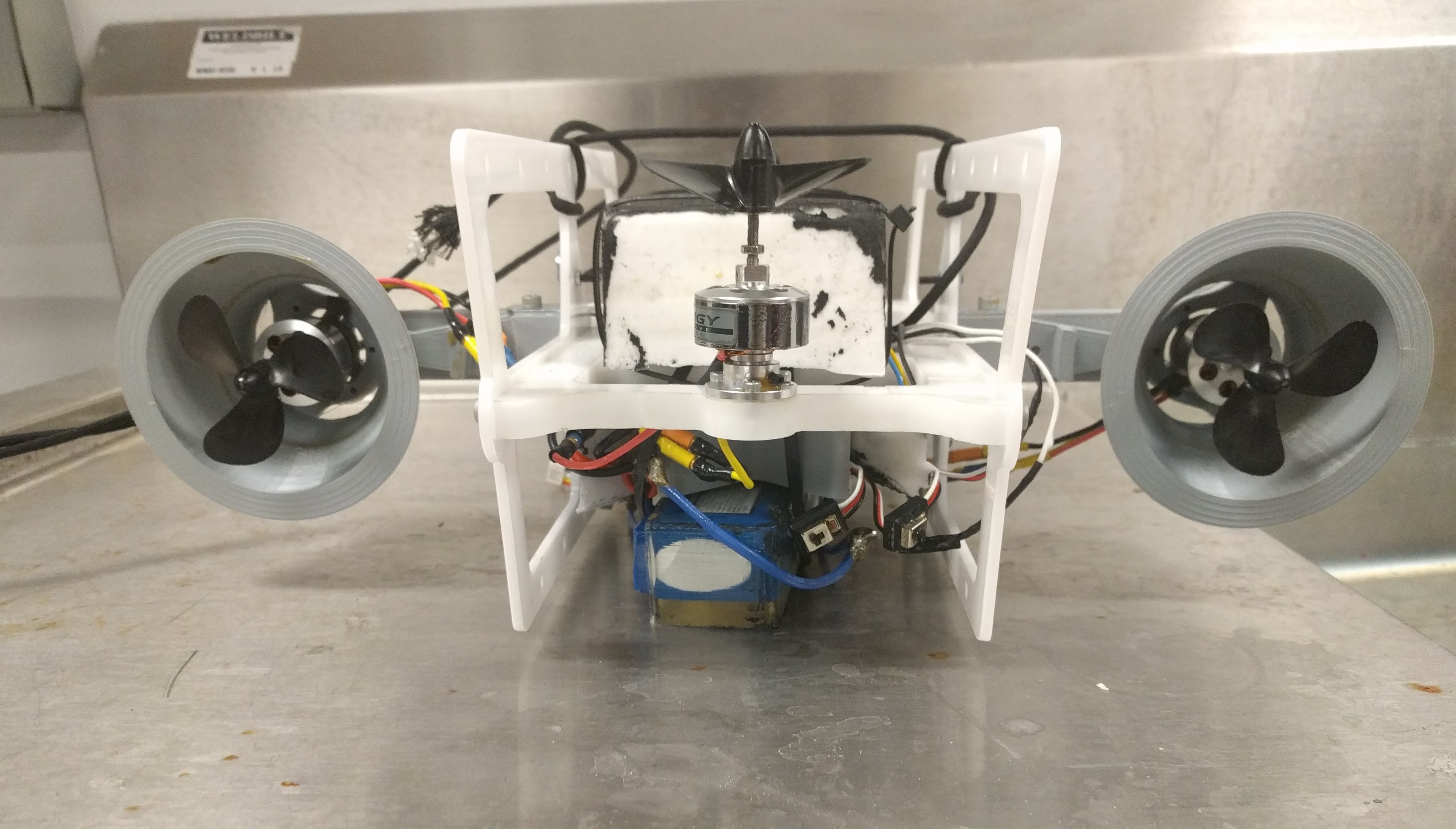
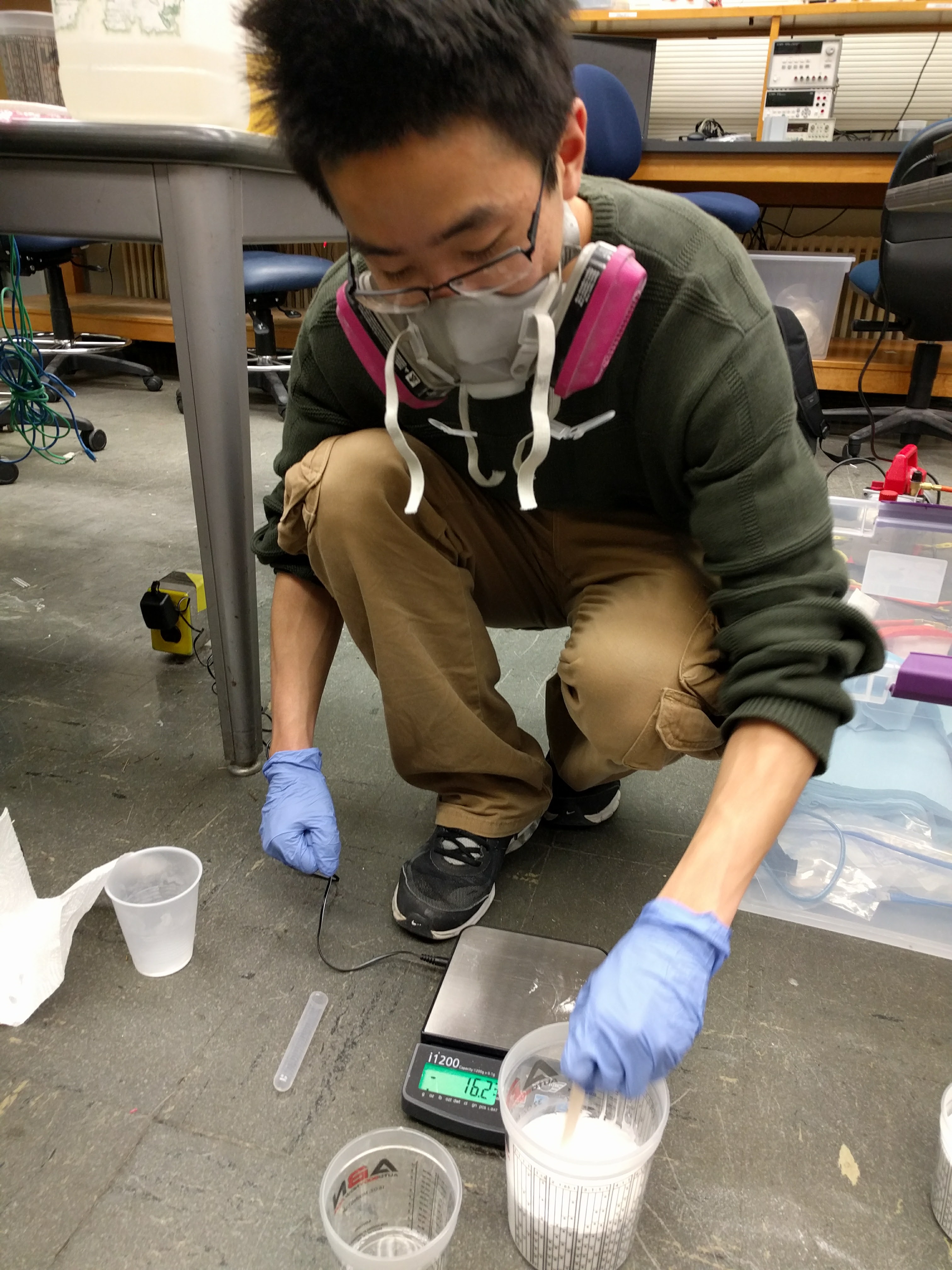
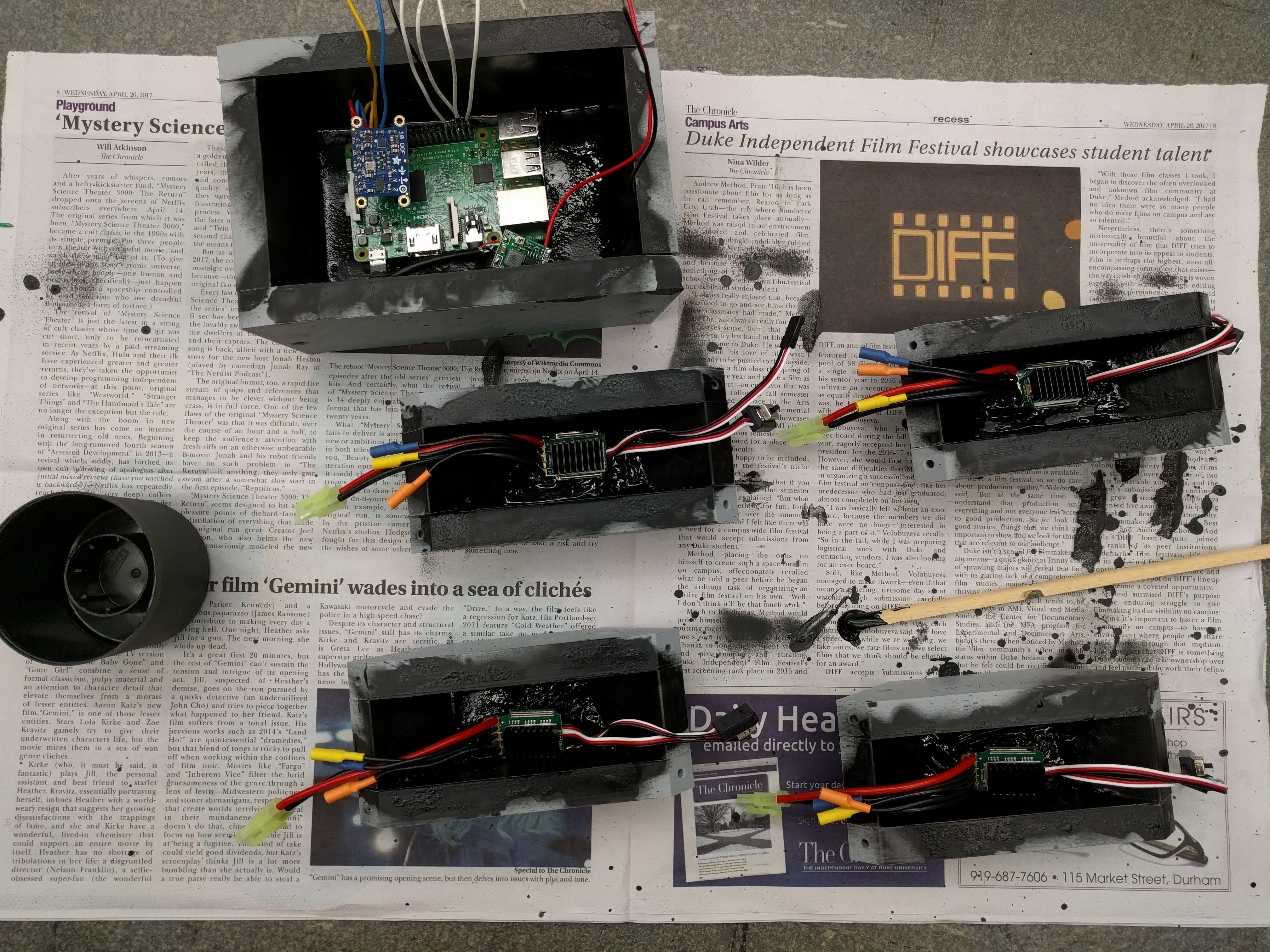
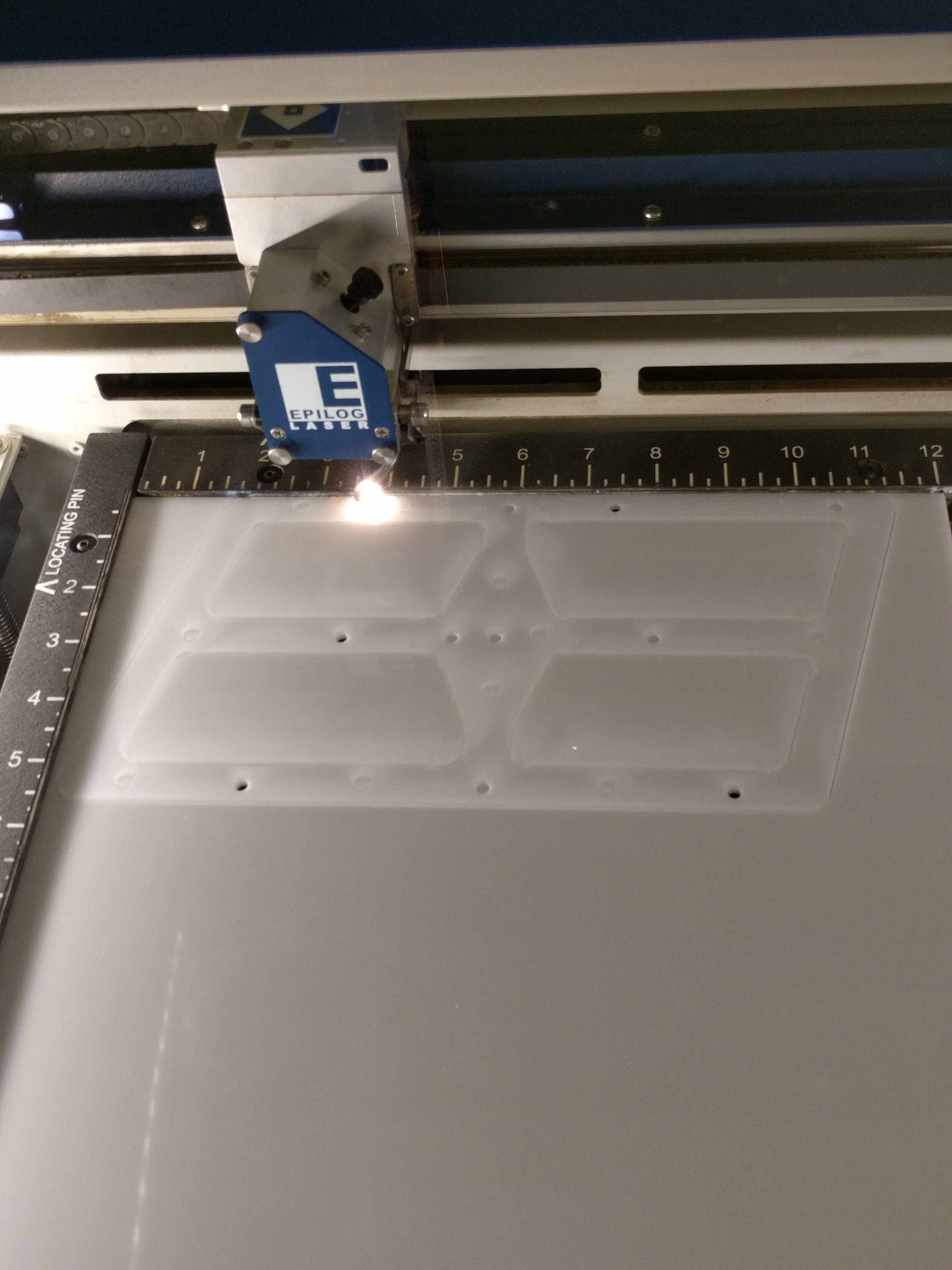
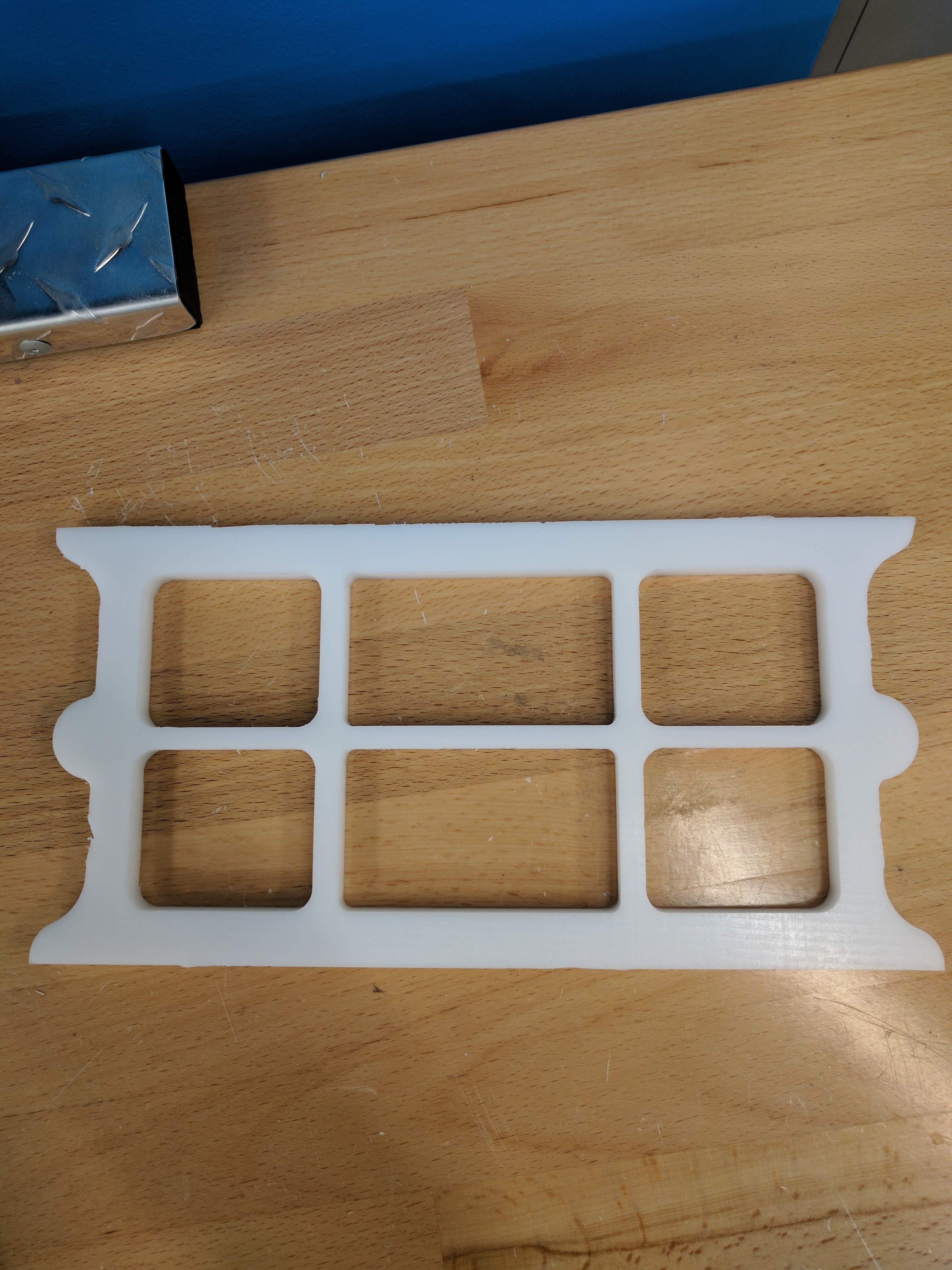
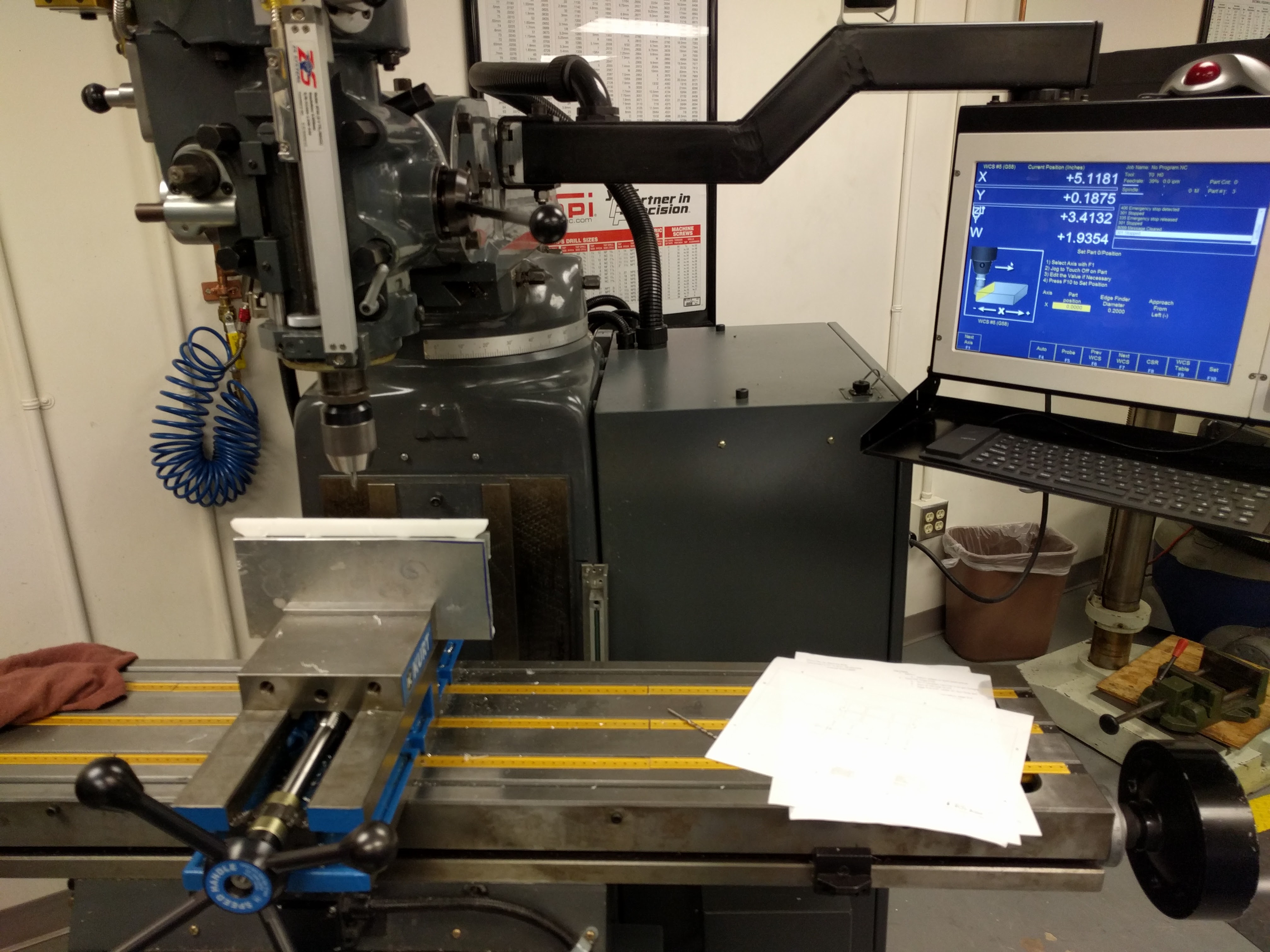
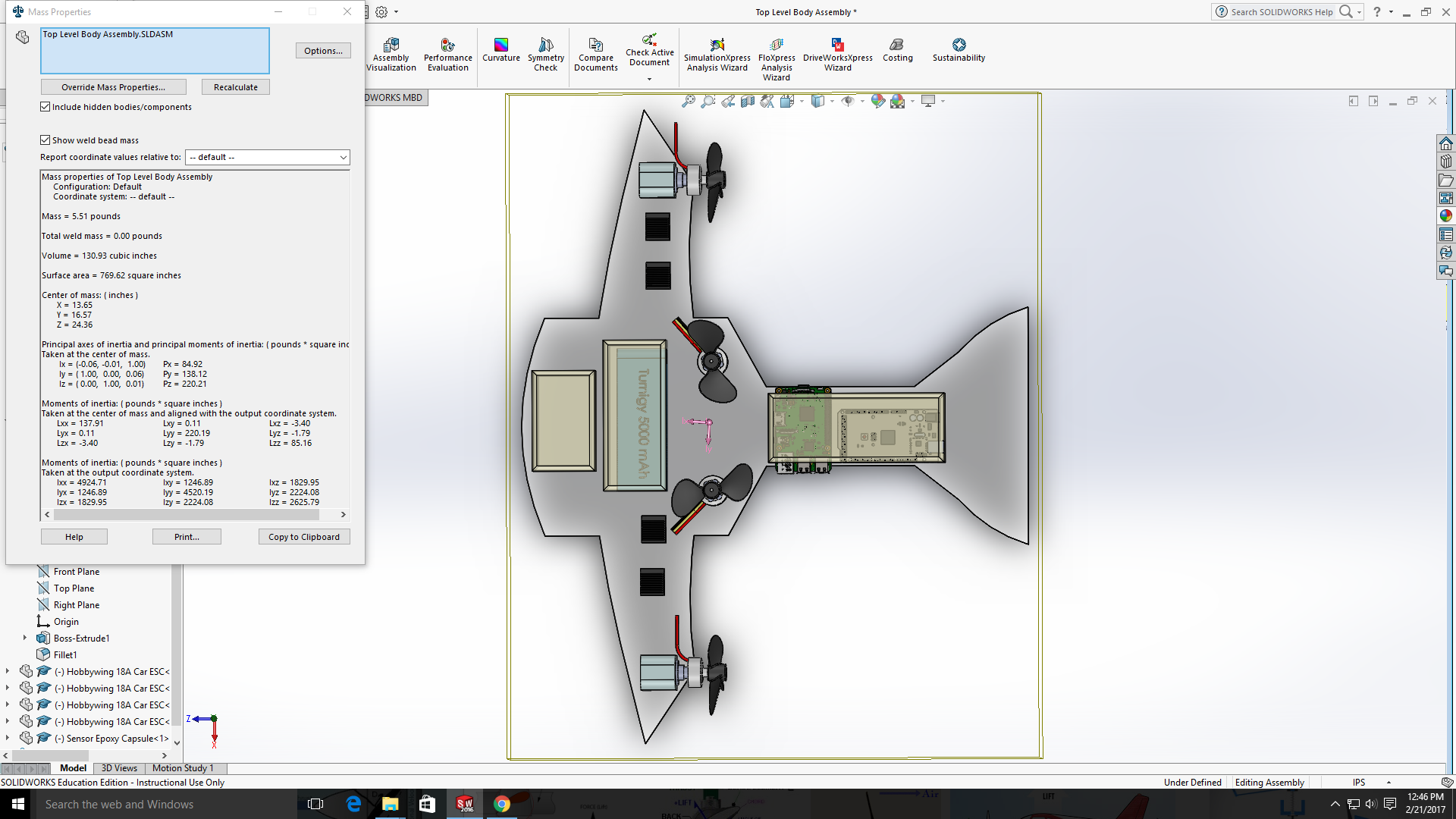
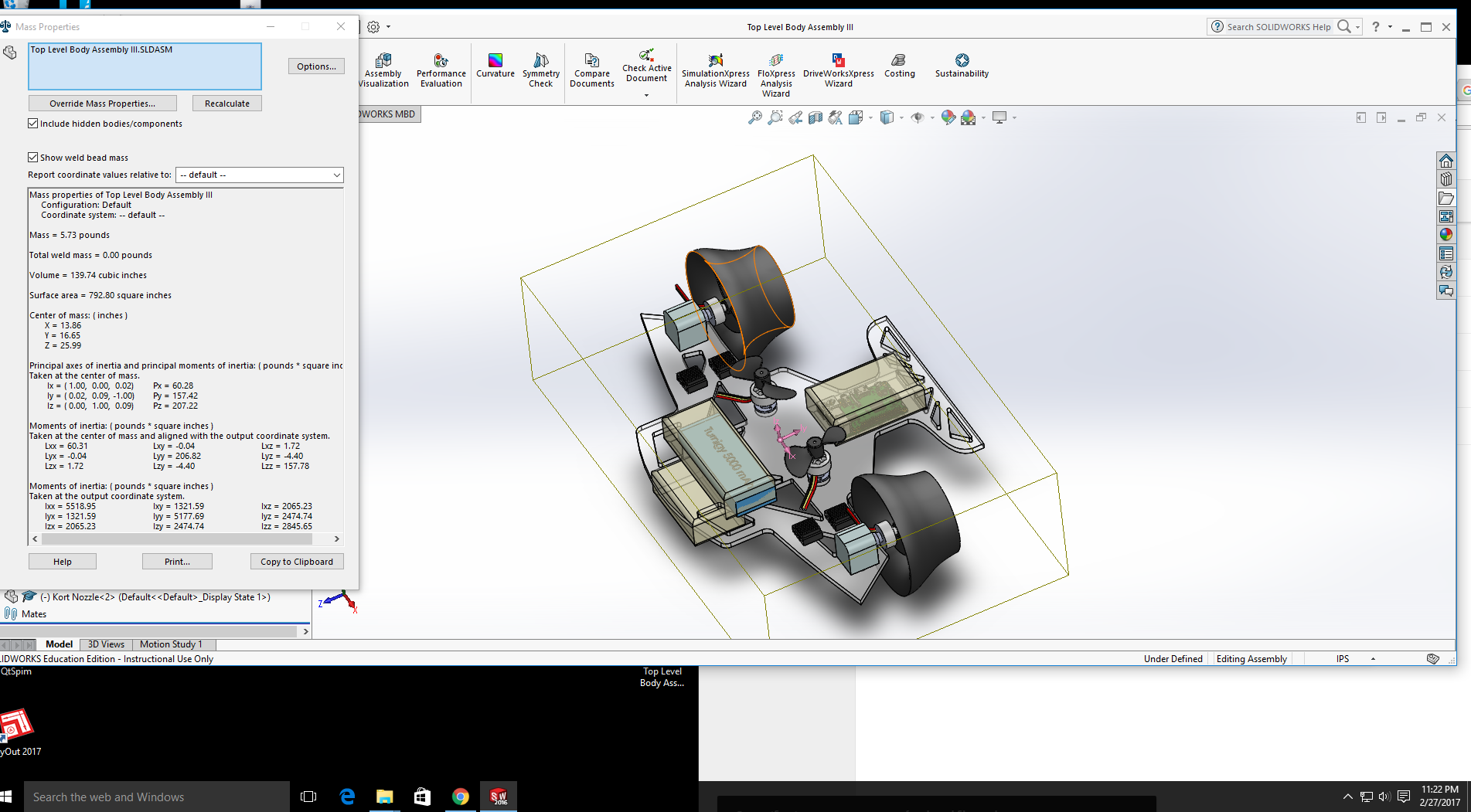
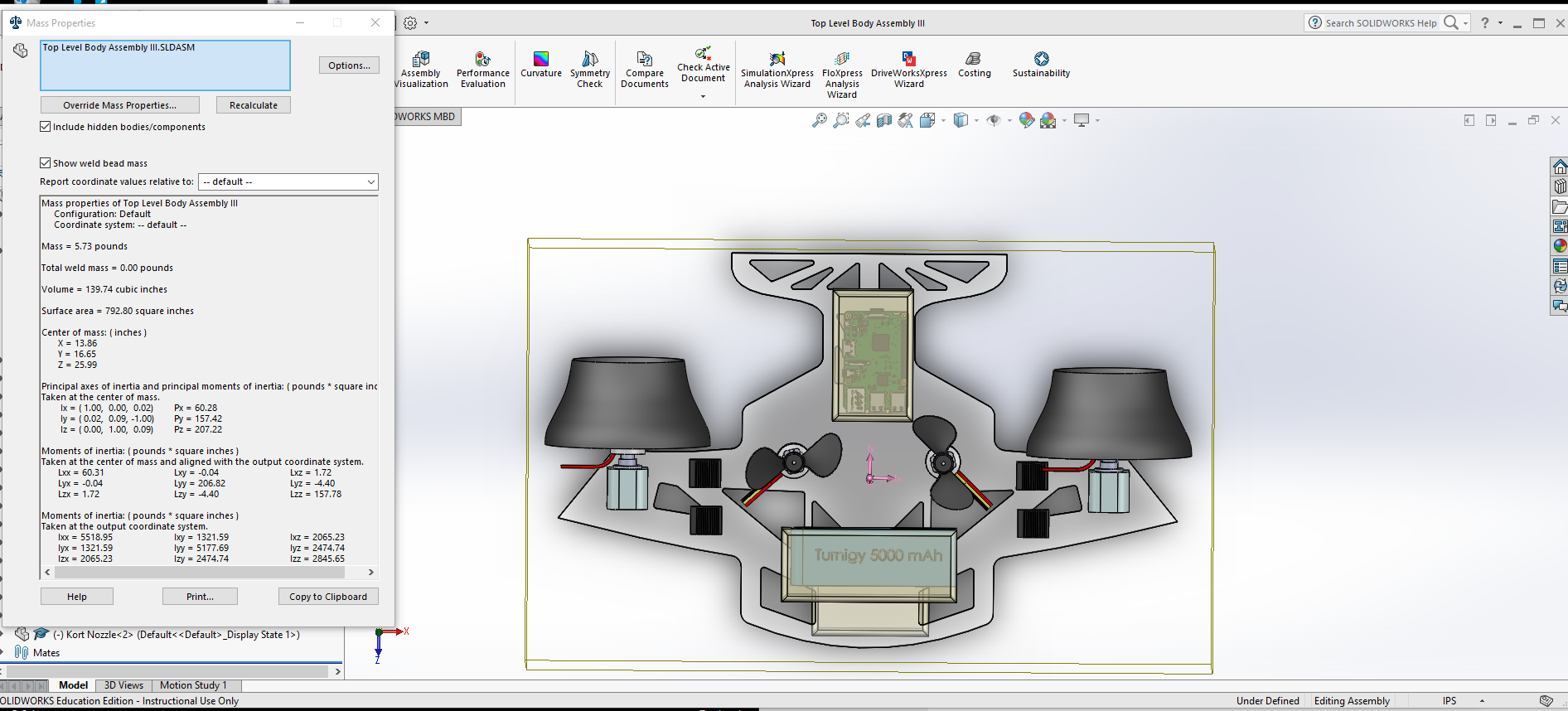
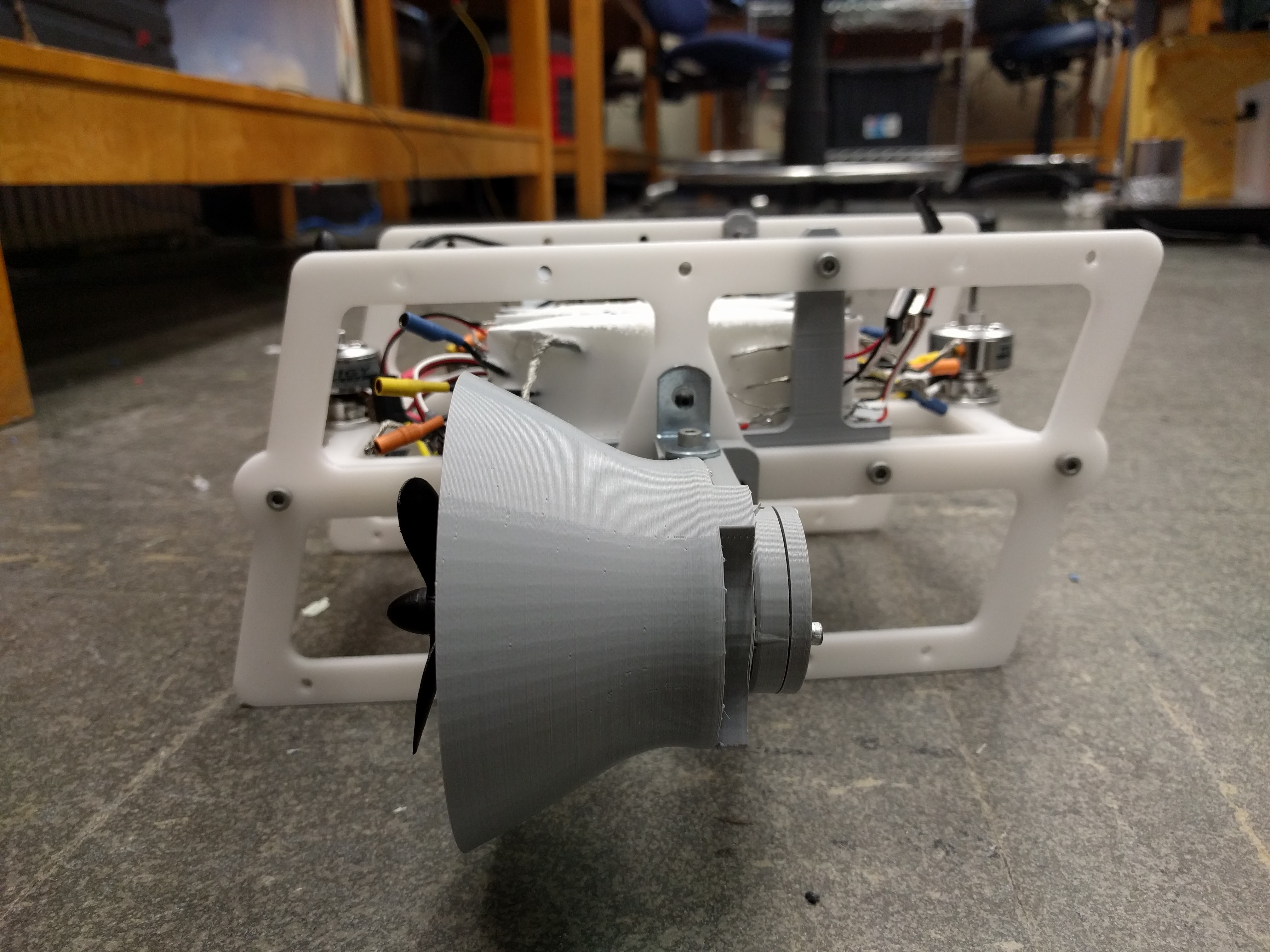
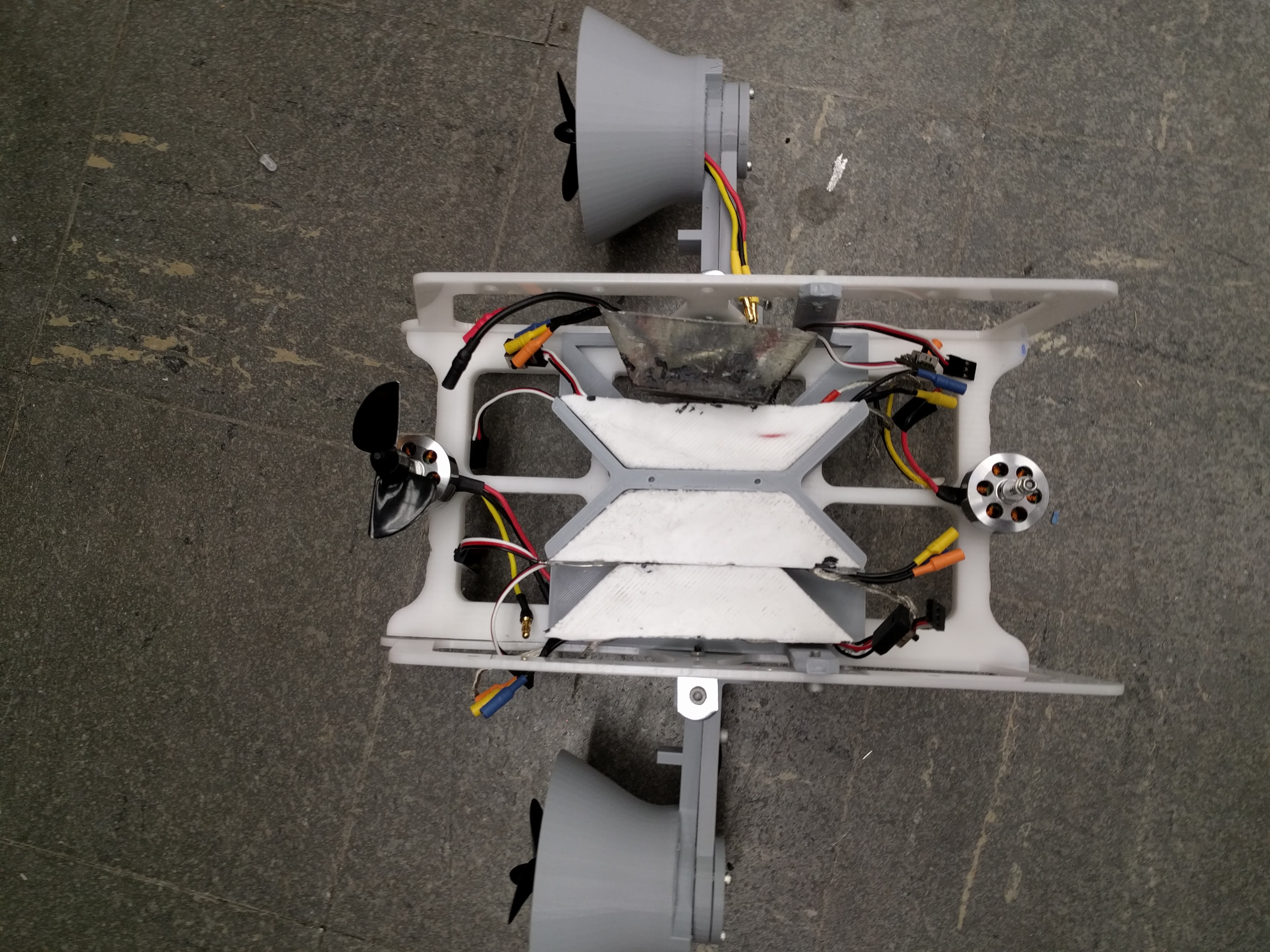
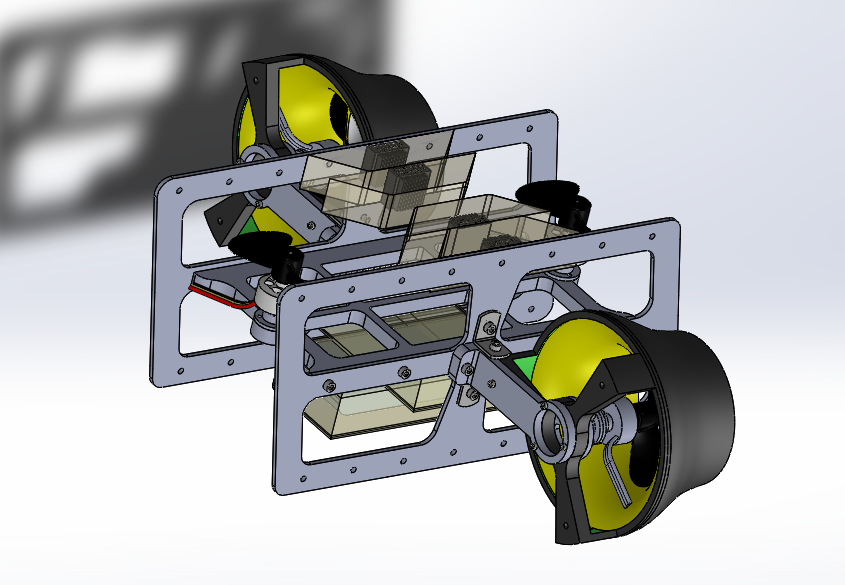
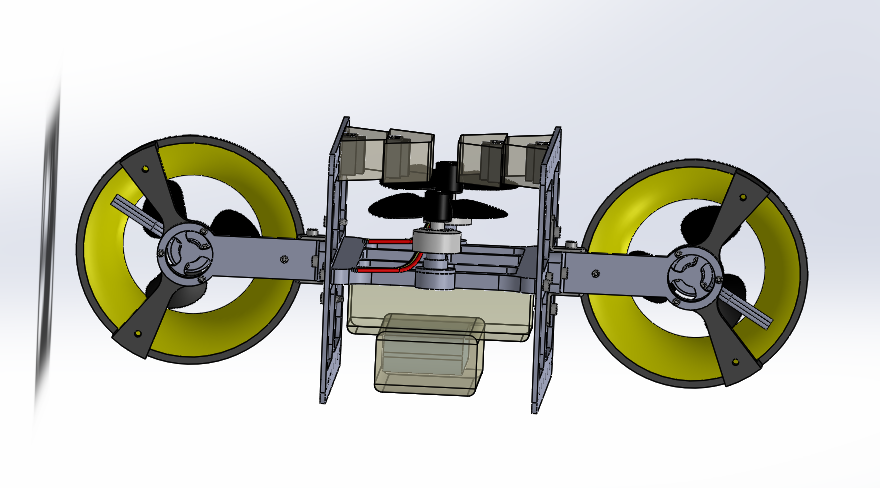
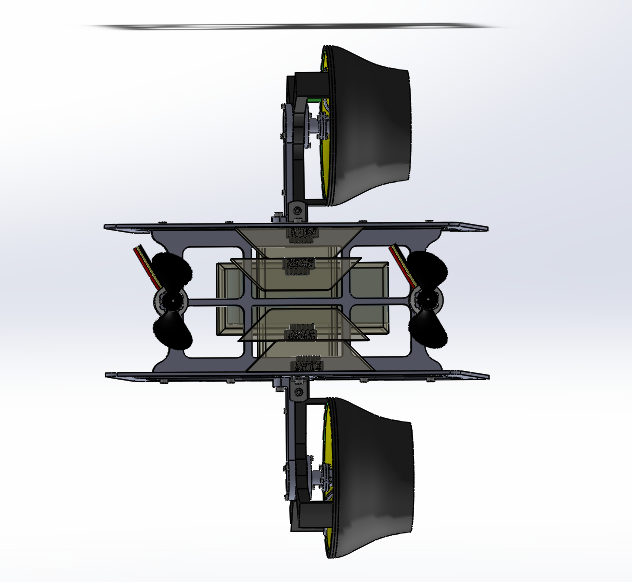
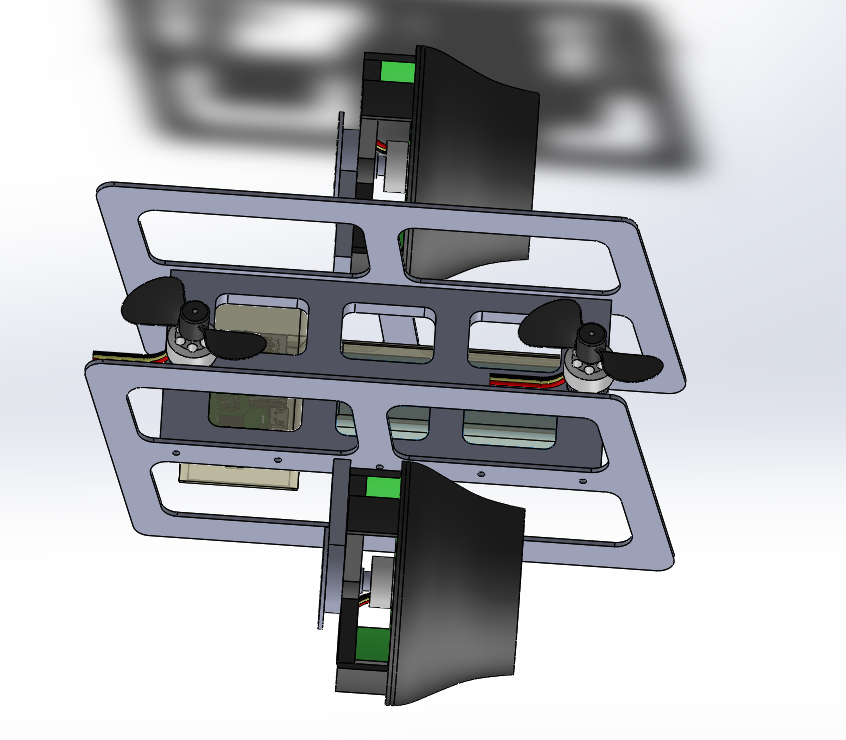
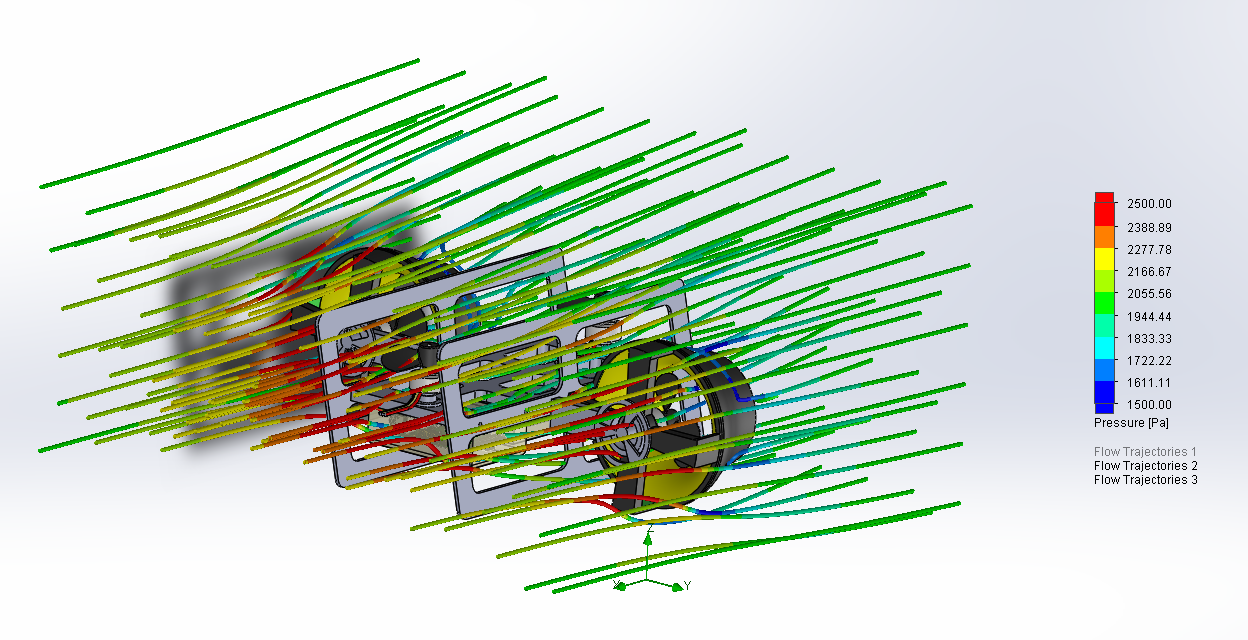
The NOAA Bonus Prize is a secondary competition in the Shell Ocean Discovery XPRIZE. The objective is to successfully detect a feature of the ocean environment by tracking its biological or chemical signature to its source. Our team designed and built a robot that can find, lock onto, and follow a pH signal and to 2000m depth at 3000 psi pressure. Our team's contribution to this project included 1.Designing and implementing a software architecture that allows for wireless reprogramming of permanently a potted Raspberry Pi 3 "brain" and four electronic speed controllers via SSH 2. Designing and manufacturing a hydrodynamic, positively buoyant vehicle with CNC'ing, 3D printing, and laser cutting 3. Experimenting and documenting various waterproofing and corrosion-proofing techniques for brushless motors and capacitors at high pressure 4. Developing theory for and successfully implementing a novel technique to waterproof electronics with protruding wires at 3000 psi (verified using at 5000 psi pressure chamber) 4. Optimizing ratios of 3M Glass micro-beads inside marine epoxy to maximize compressive strength and minimize specific gravity.
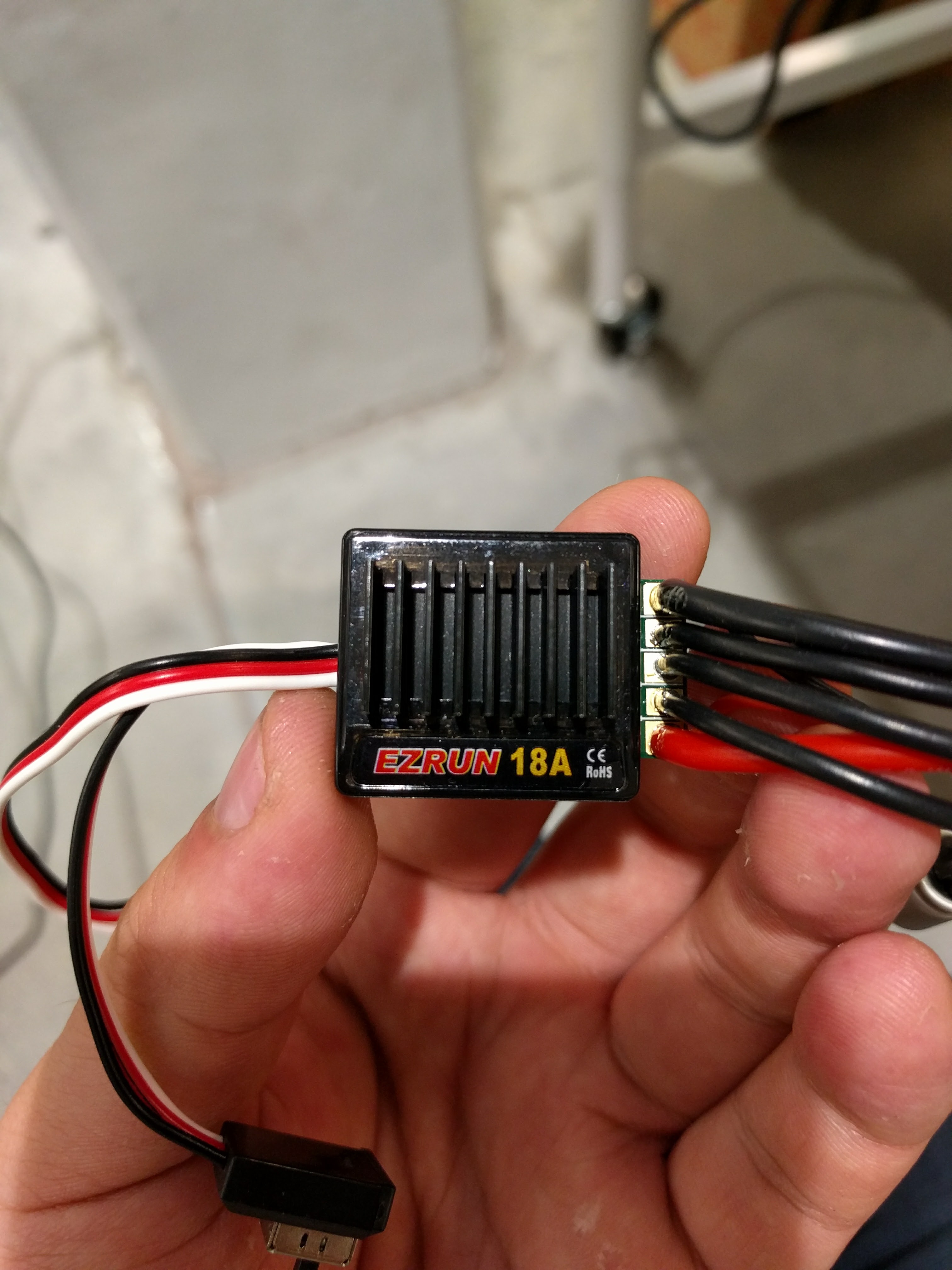
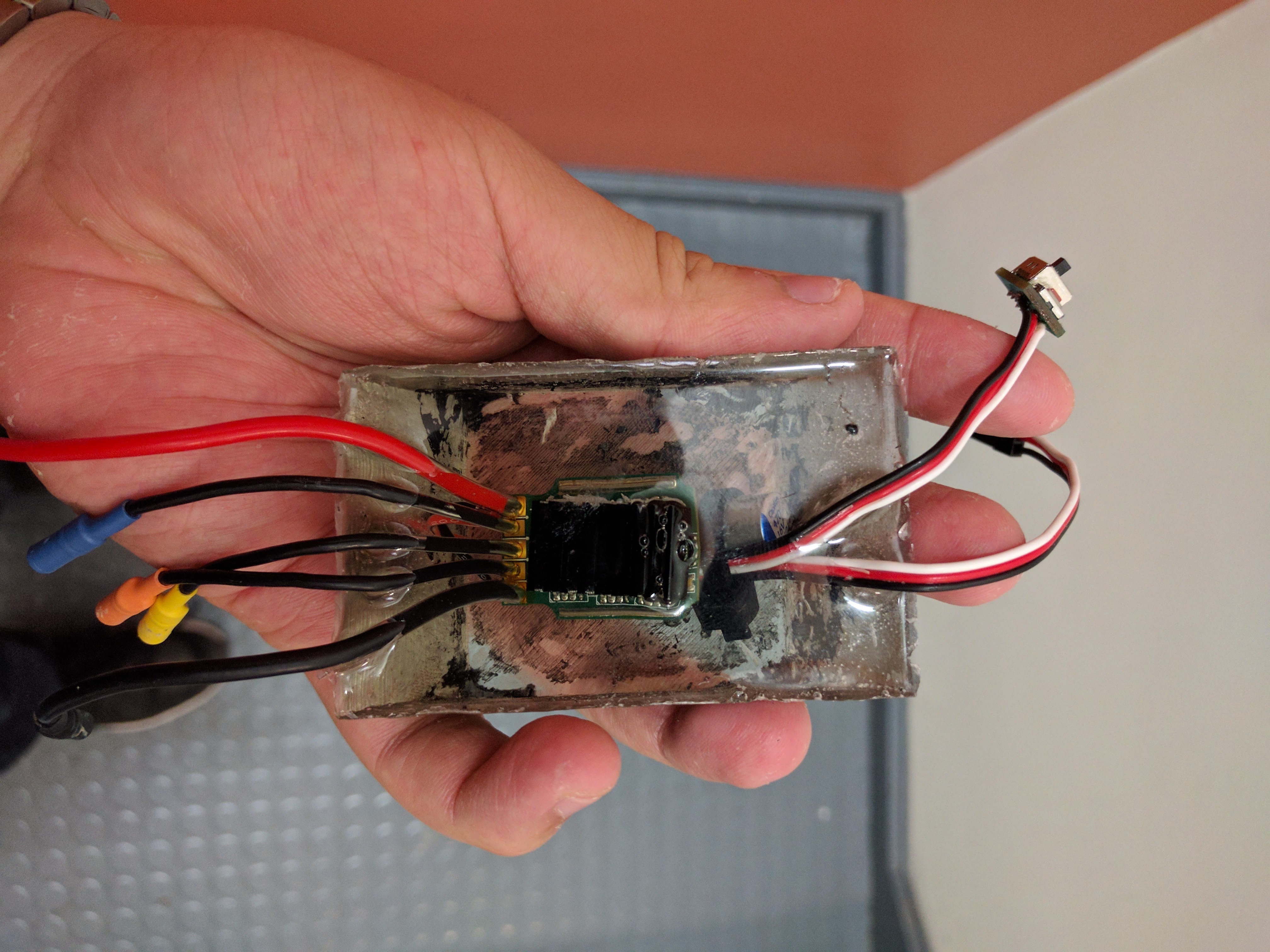
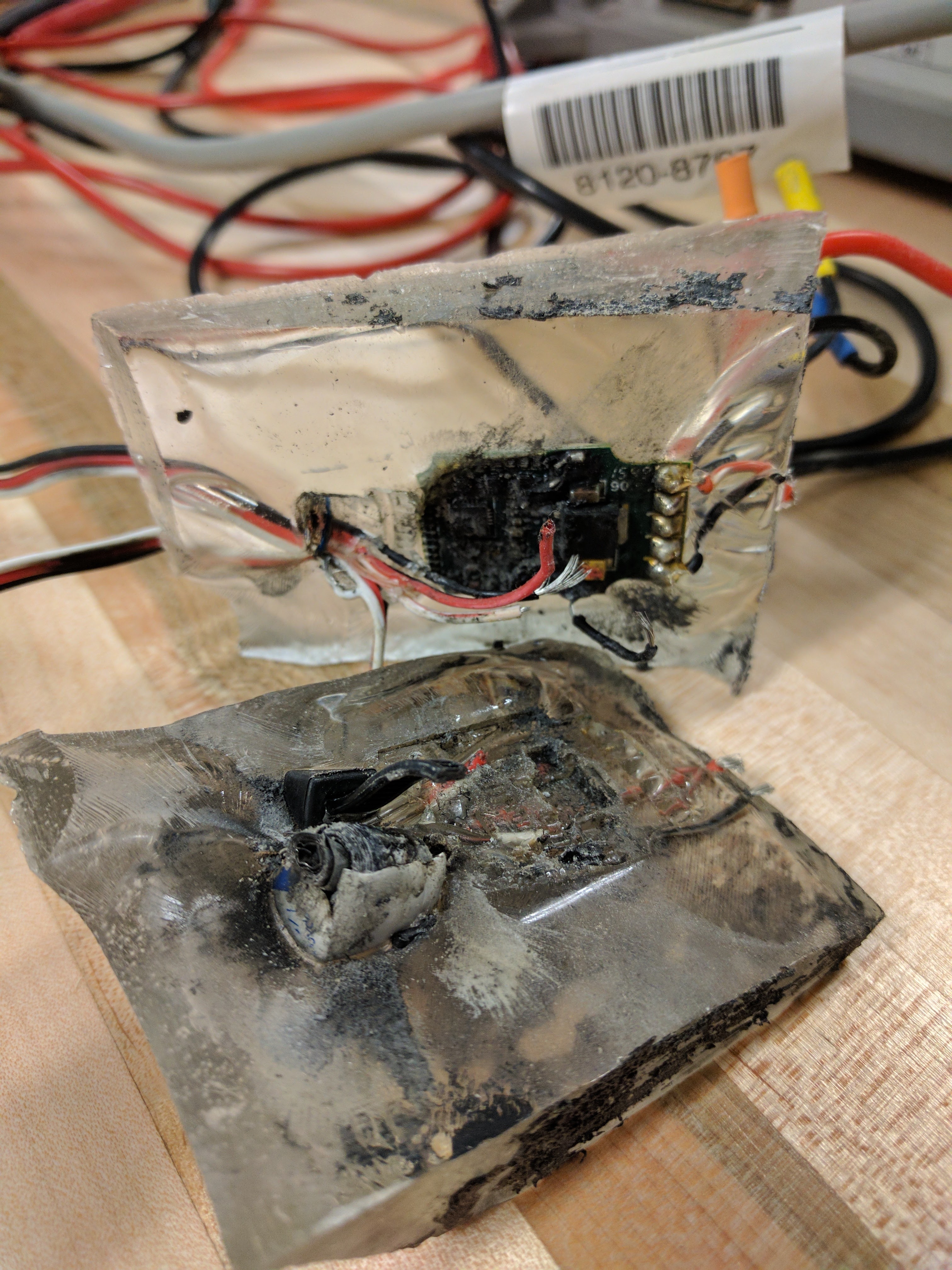
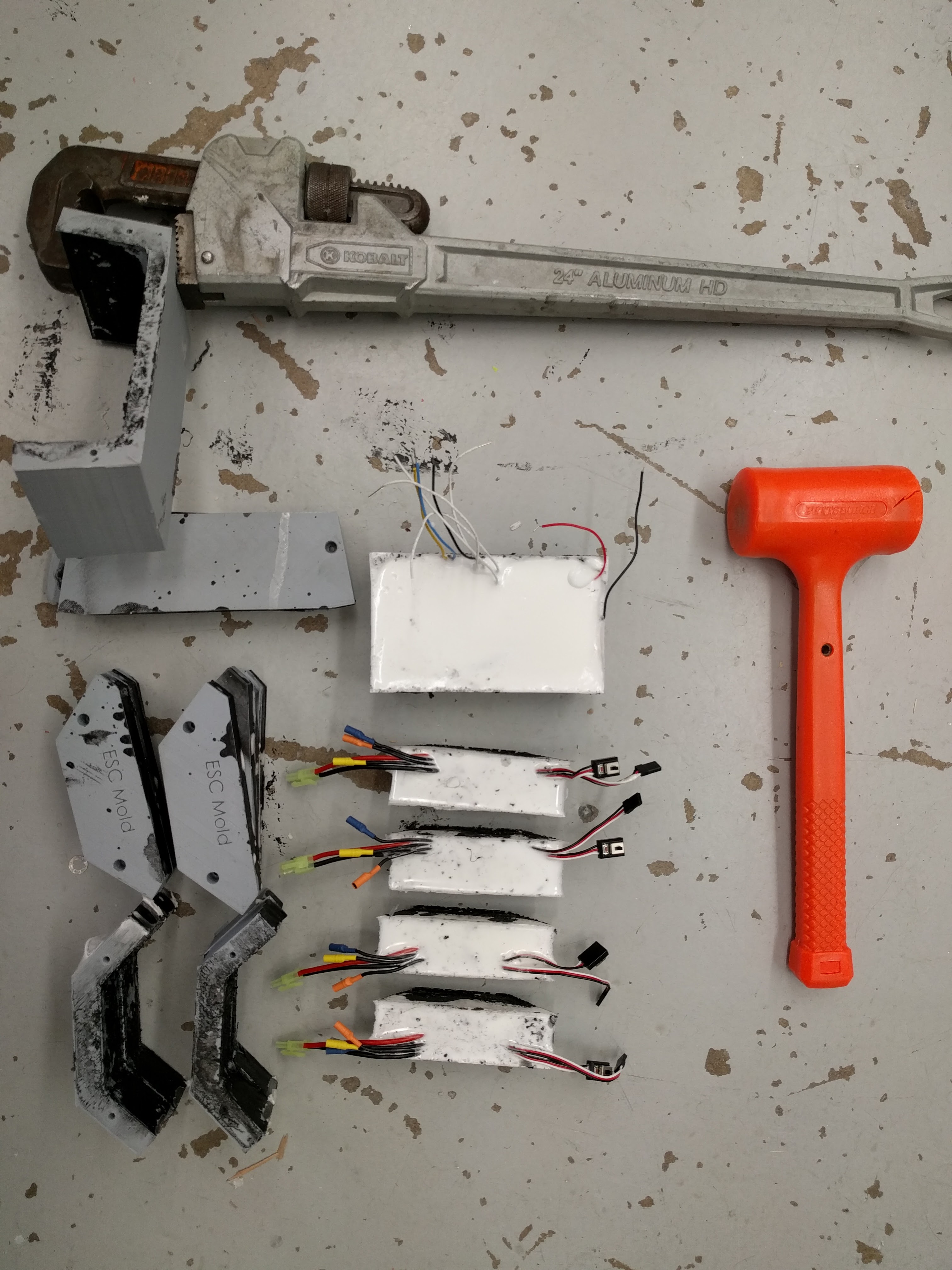
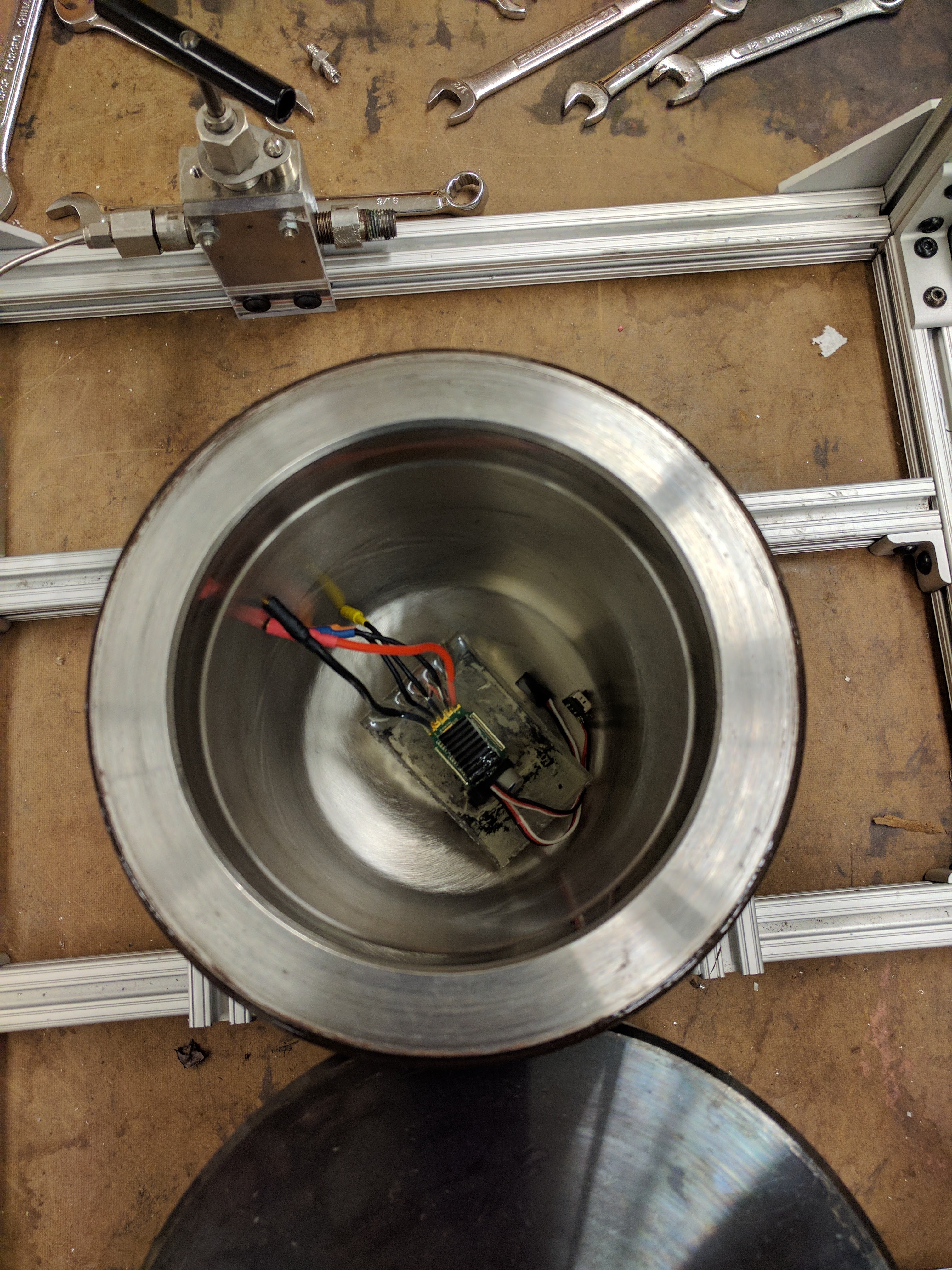
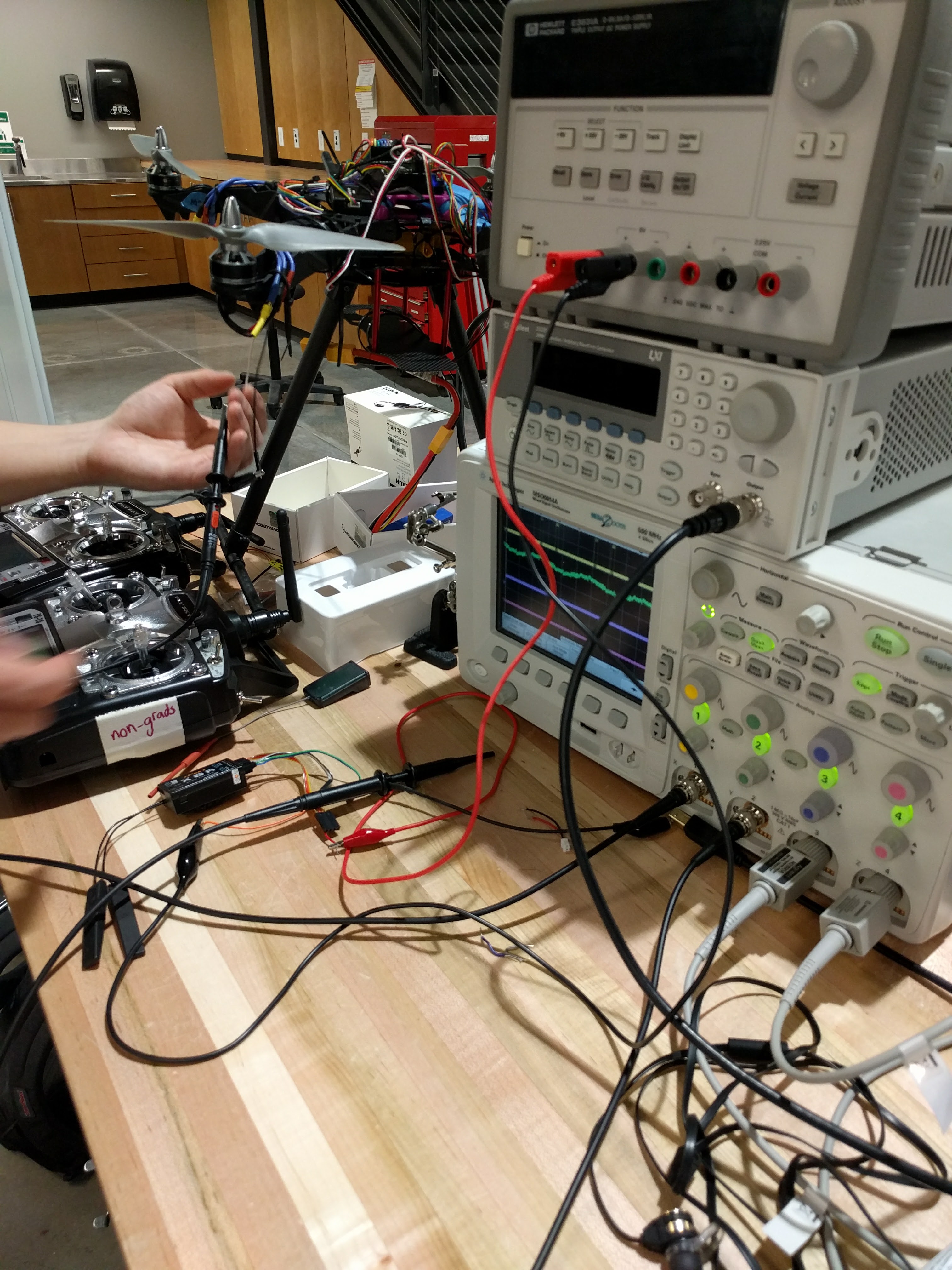
A car ESC was chosen because quadcopter ESCs do not need a reverse function, and therefore often do not feature it. The difference between the two is that car ESCs are specially designed to have high burst current and to reverse. Thus, we chose the Hobbywing EZRUN 18A Car ESC because they were only $20 each, as compared to the the $60+ other ones because they have better burst current (meant for cars to do fancy wheelies) . One distinct difference between quadcopter ESCs and car ESCs are that there is a 470 nF capacitor between the ground and power lines to filter out high voltage spikes. We have chosen to remove it as well as the casing for the ESC. A heat sink was attaching to our ESC only for the reason of handling burst current. We treat the ocean as an infinite thermal sink, by which a steady-state thermal gradient will exist between the ESC at max power and the epoxy.
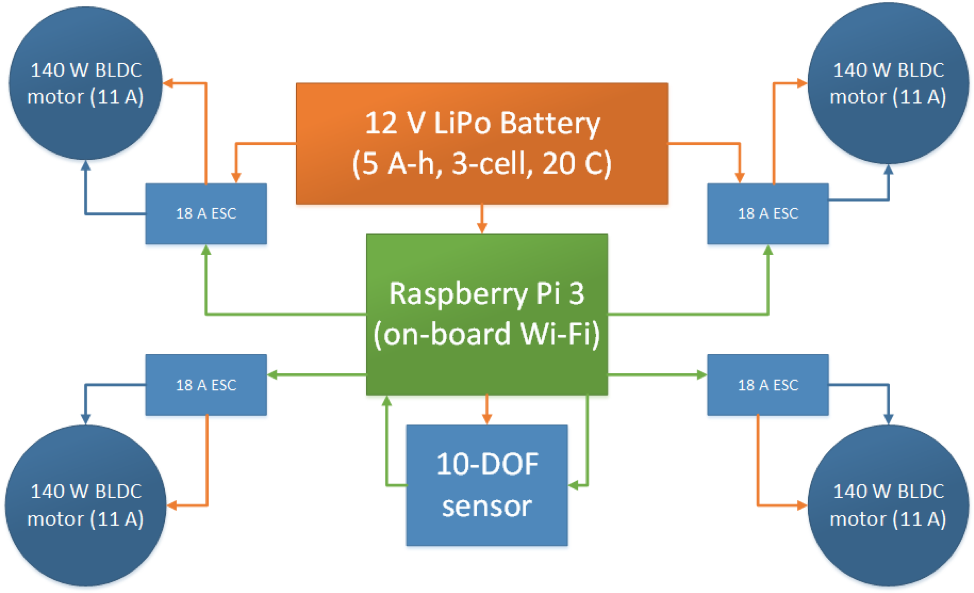
The PWM signals driven by the Pi’s GPIO pins are DMA-based, which means that heavy usage of the processor will introduce noticeable phase noise, though the error in duty cycle is generally no more than a few percent. For instance, running Minecraft causes the following jitter in PWM. Even though ESCs can tolerate jitter in duty cycle, calibrate them without running other applications on the Pi, especially since it fails to recognize calibration waveforms if the duty cycle changes too quickly. We need to program the ESCs to rock crawler mode in order to drive their motors in reverse without the need to ‘double tap’, which means transitioning the PWM duty cycle to low, back to neutral, and finally to low again. The reverse spin rate seems to be slower than the forward spin rate at a symmetrical equivalent duty cycle.
Timeline: Jan 2017 - May 2017
Team Members: Henry Quach and Tom Wu
Advisors: Martin Brooke, Ph.D, Tyler Bletsch, Ph.D
Key Words: Electronic Speed Controller (ESC), Hydrodynamics, Corrosion, Wireless Reprogramming
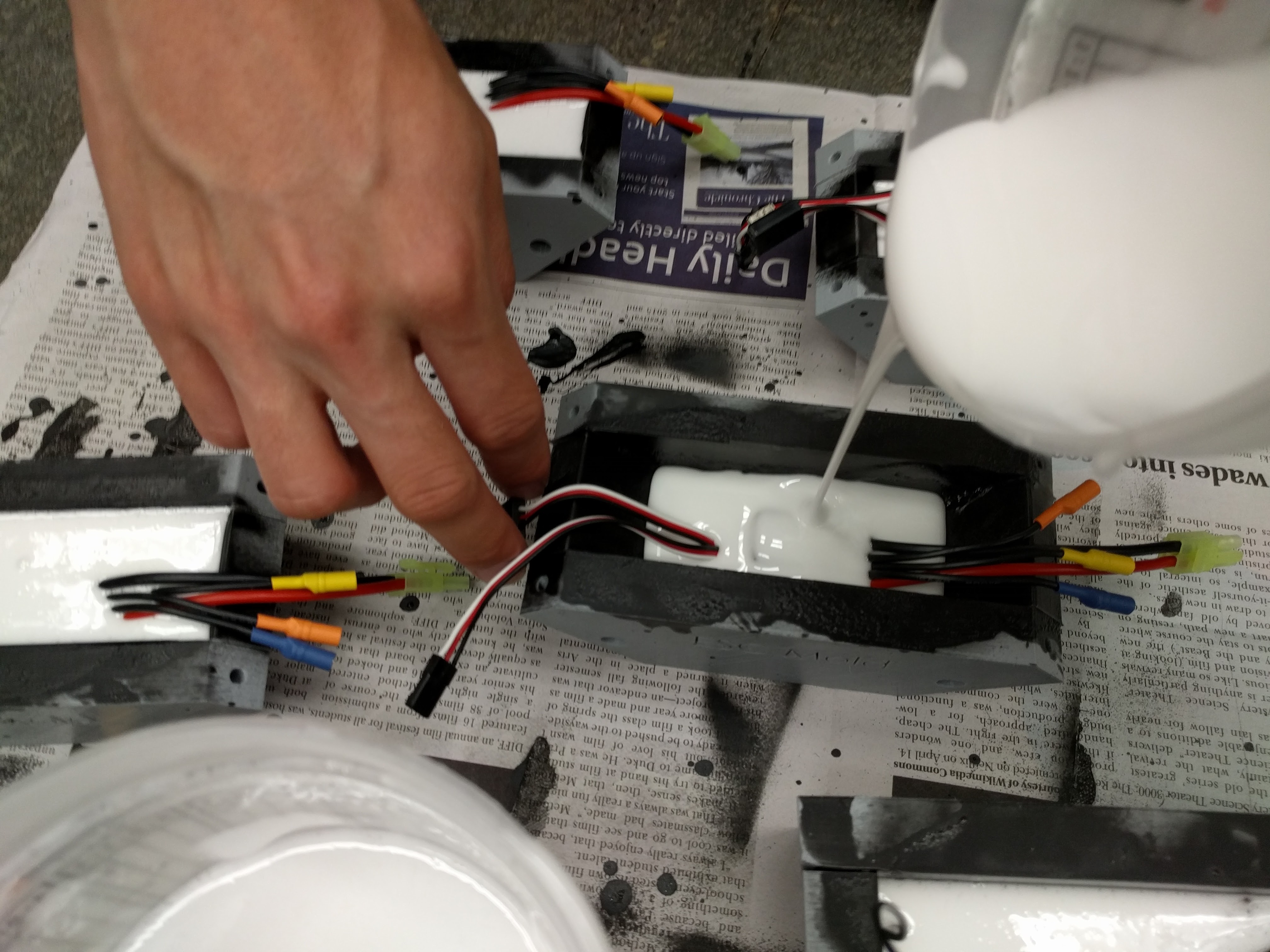
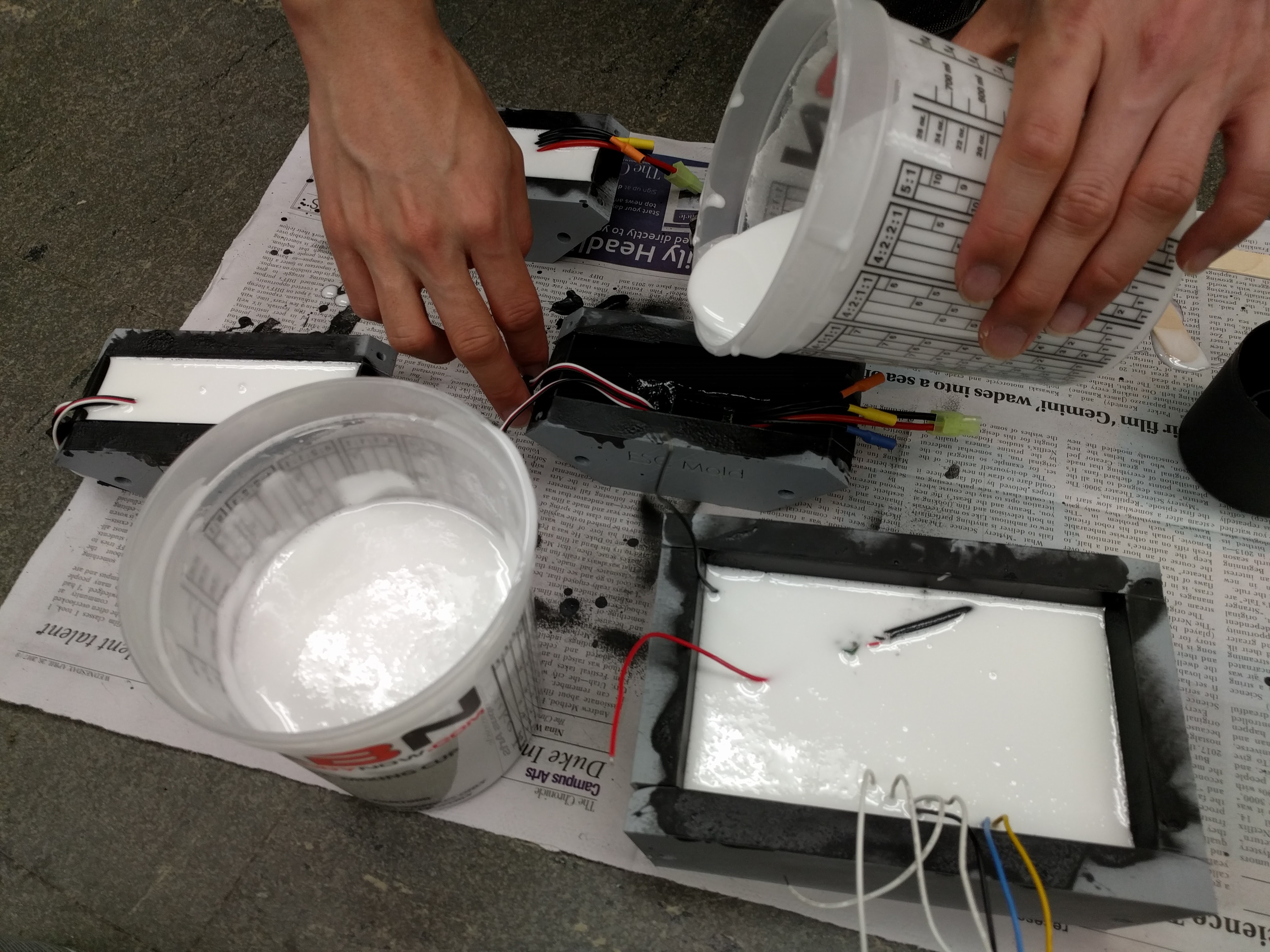
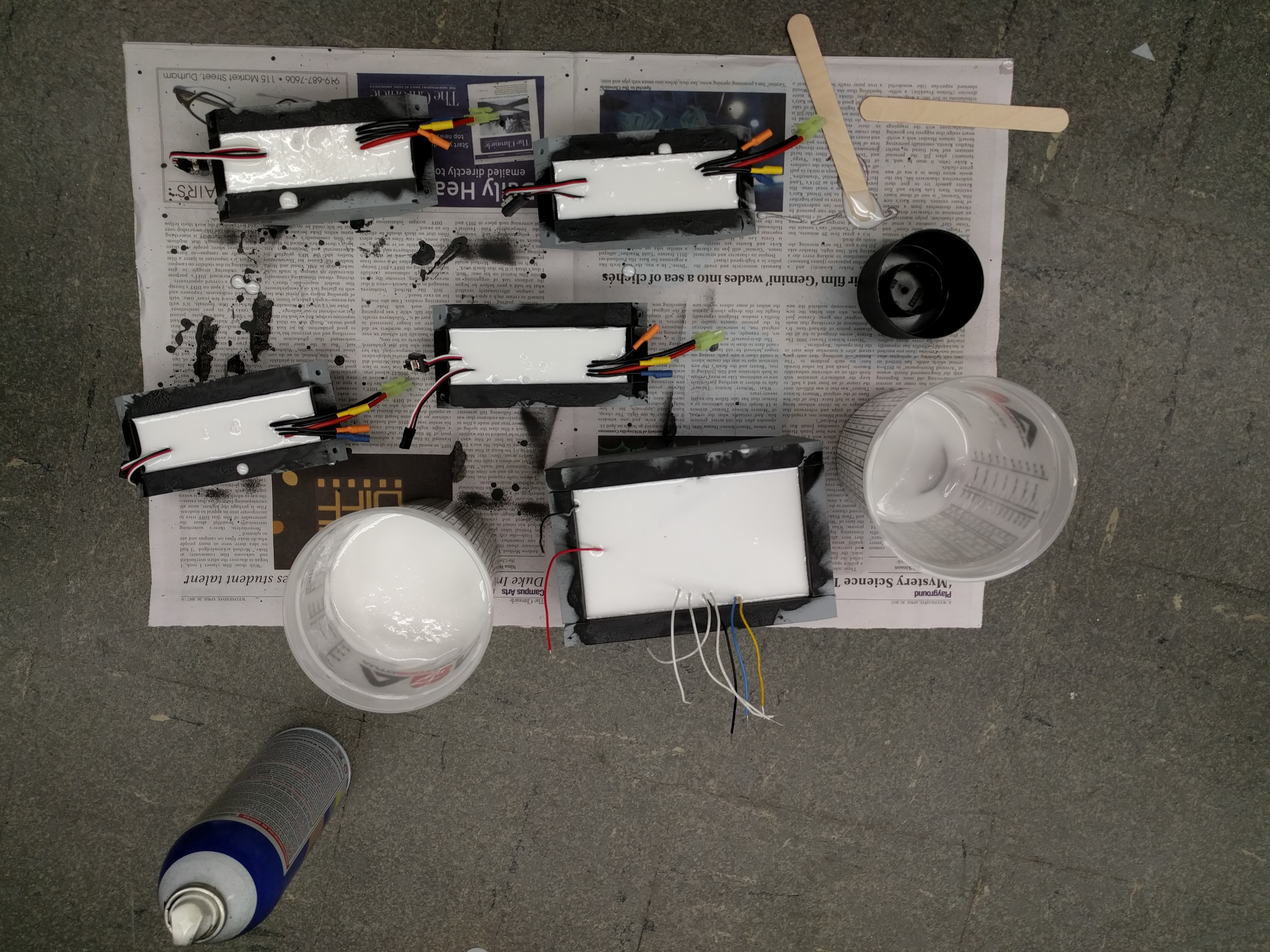
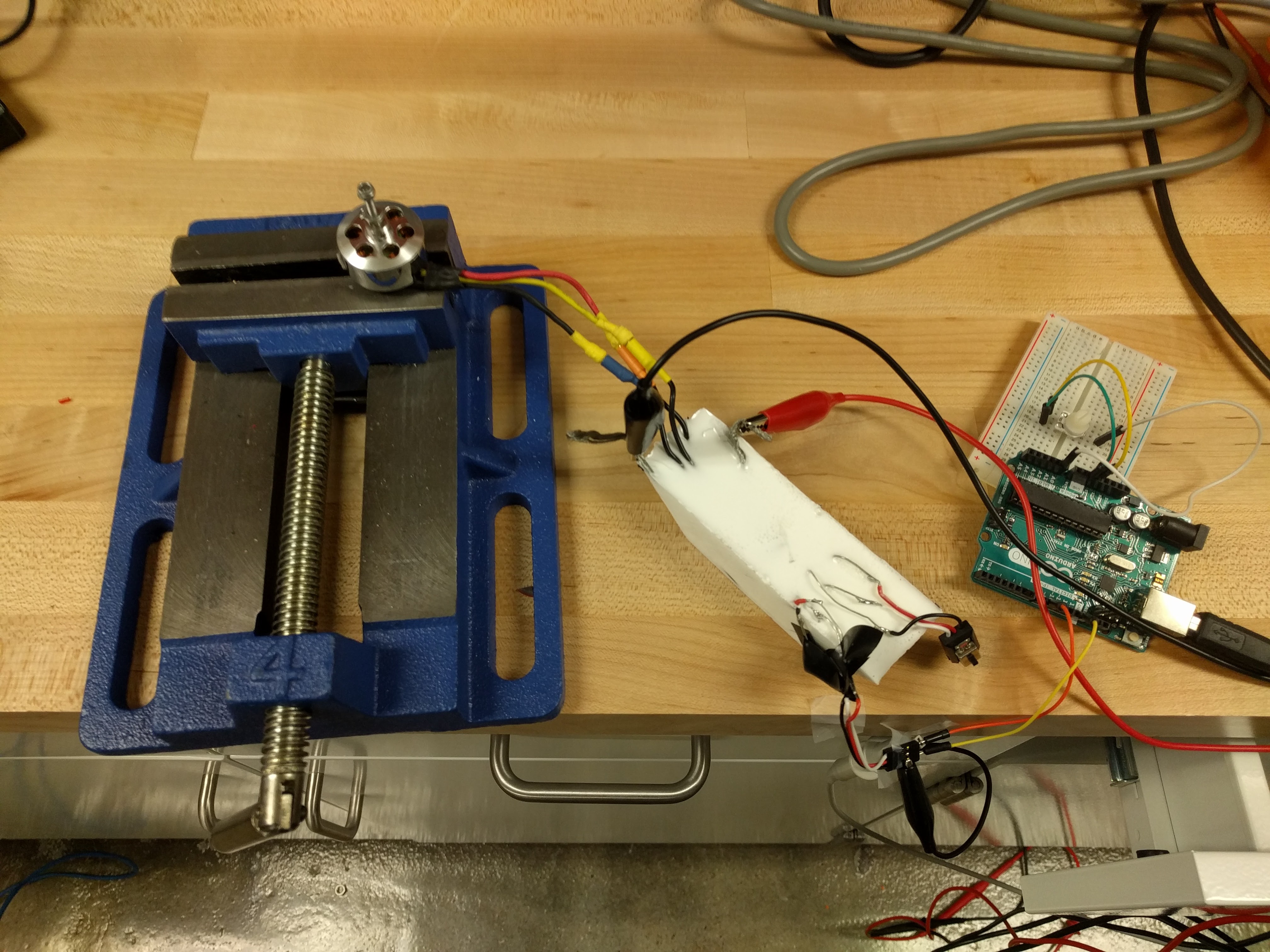
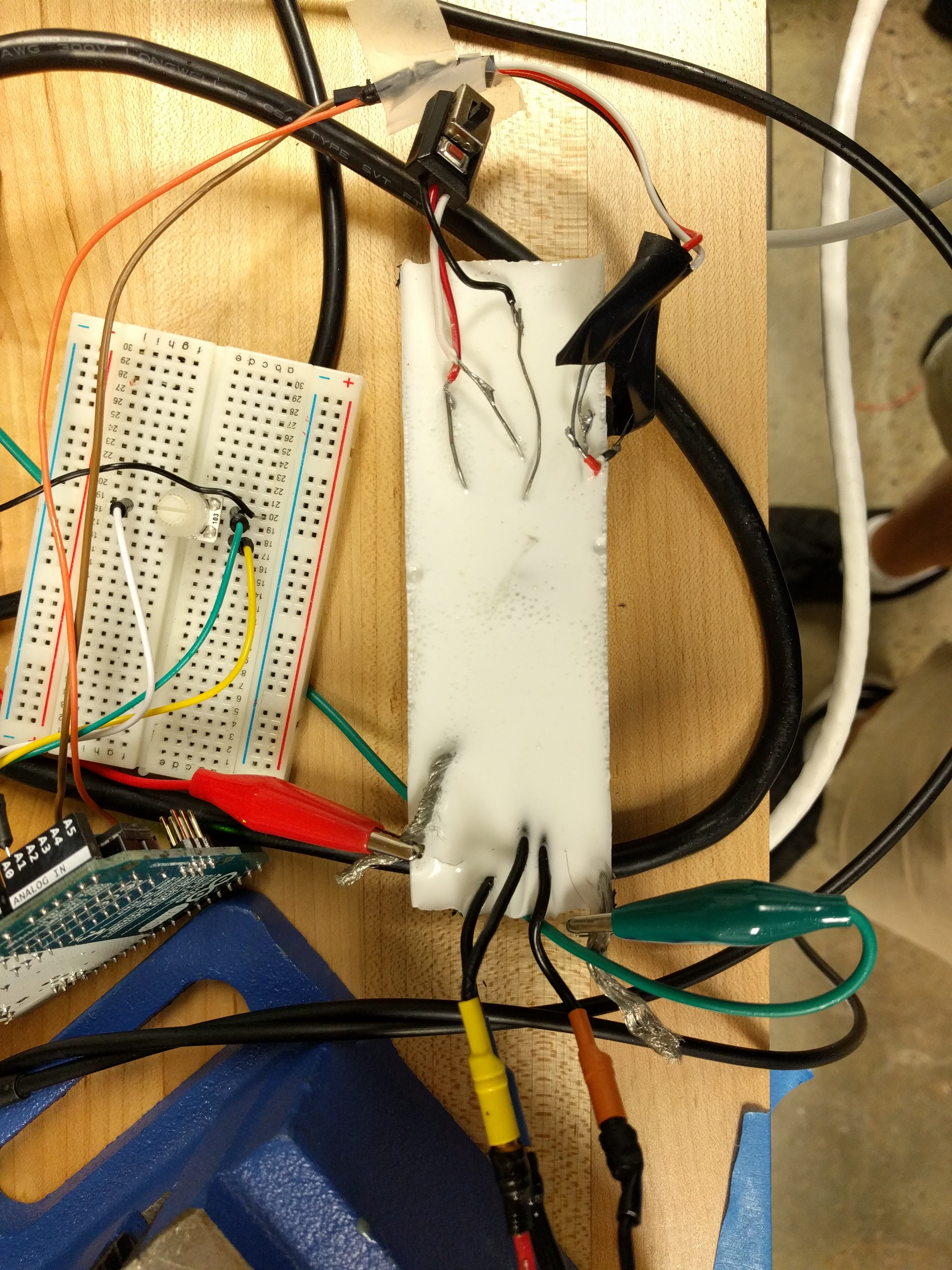
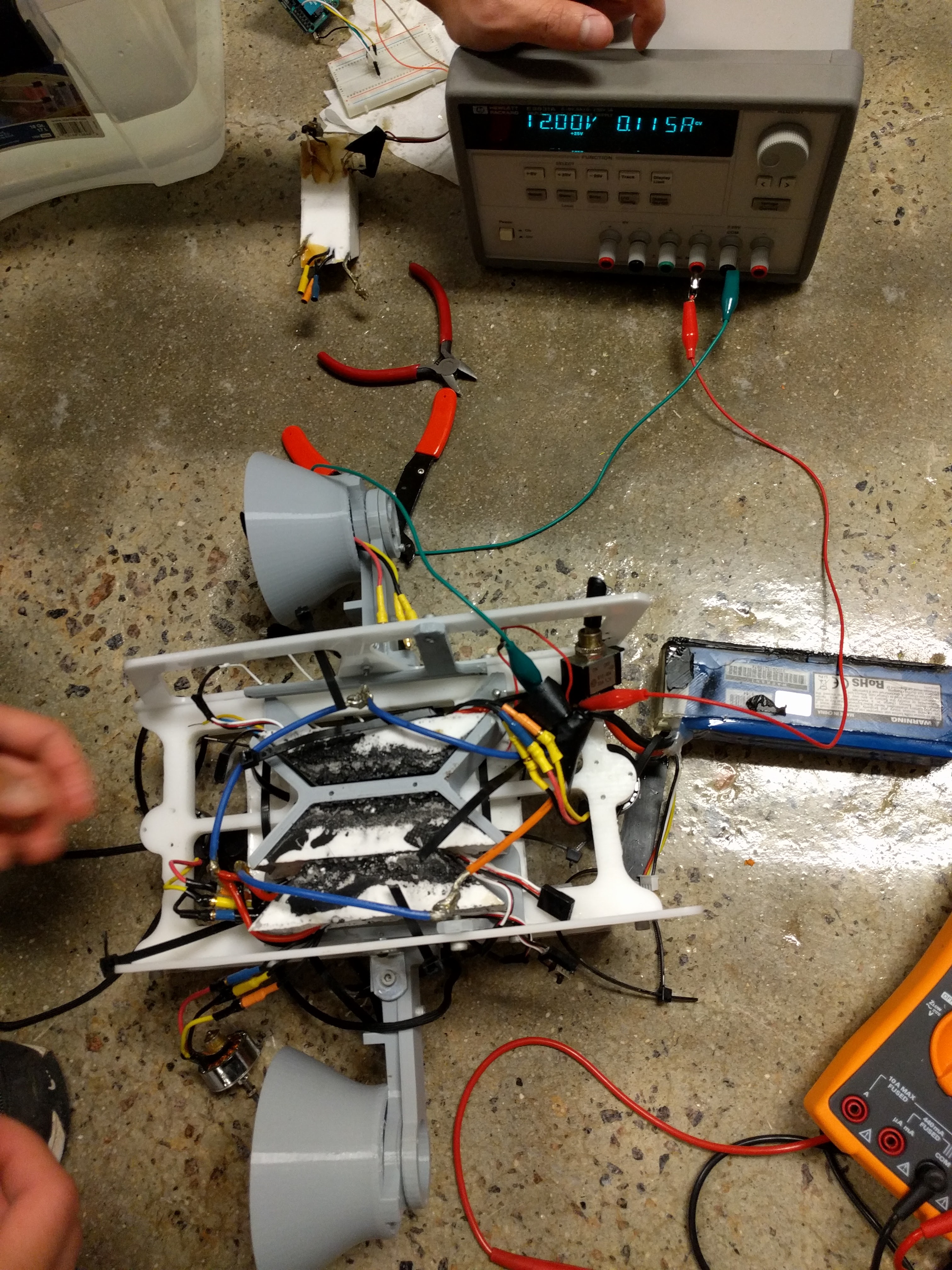
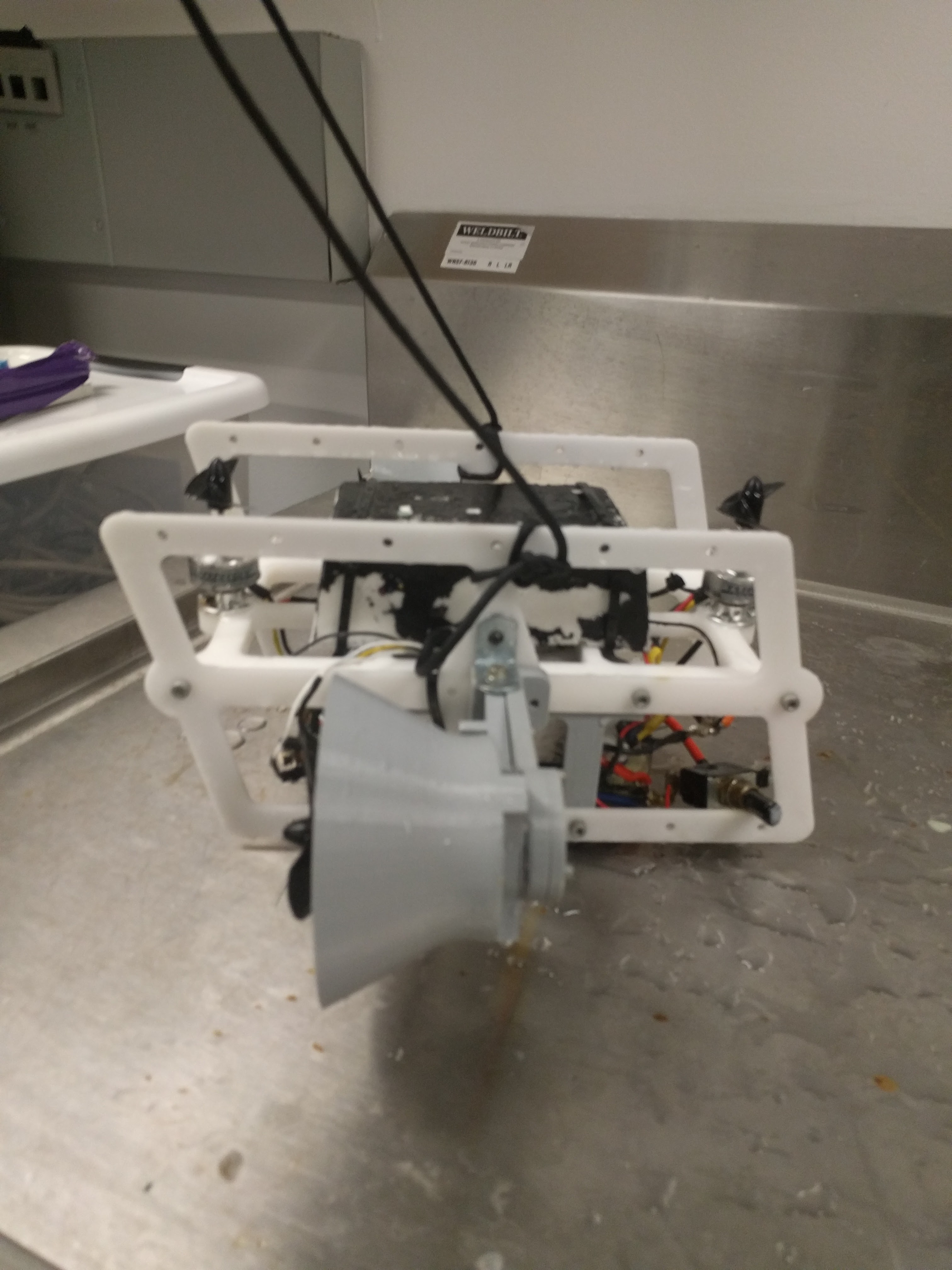
Initial Sealing and Corrosion Prototyping
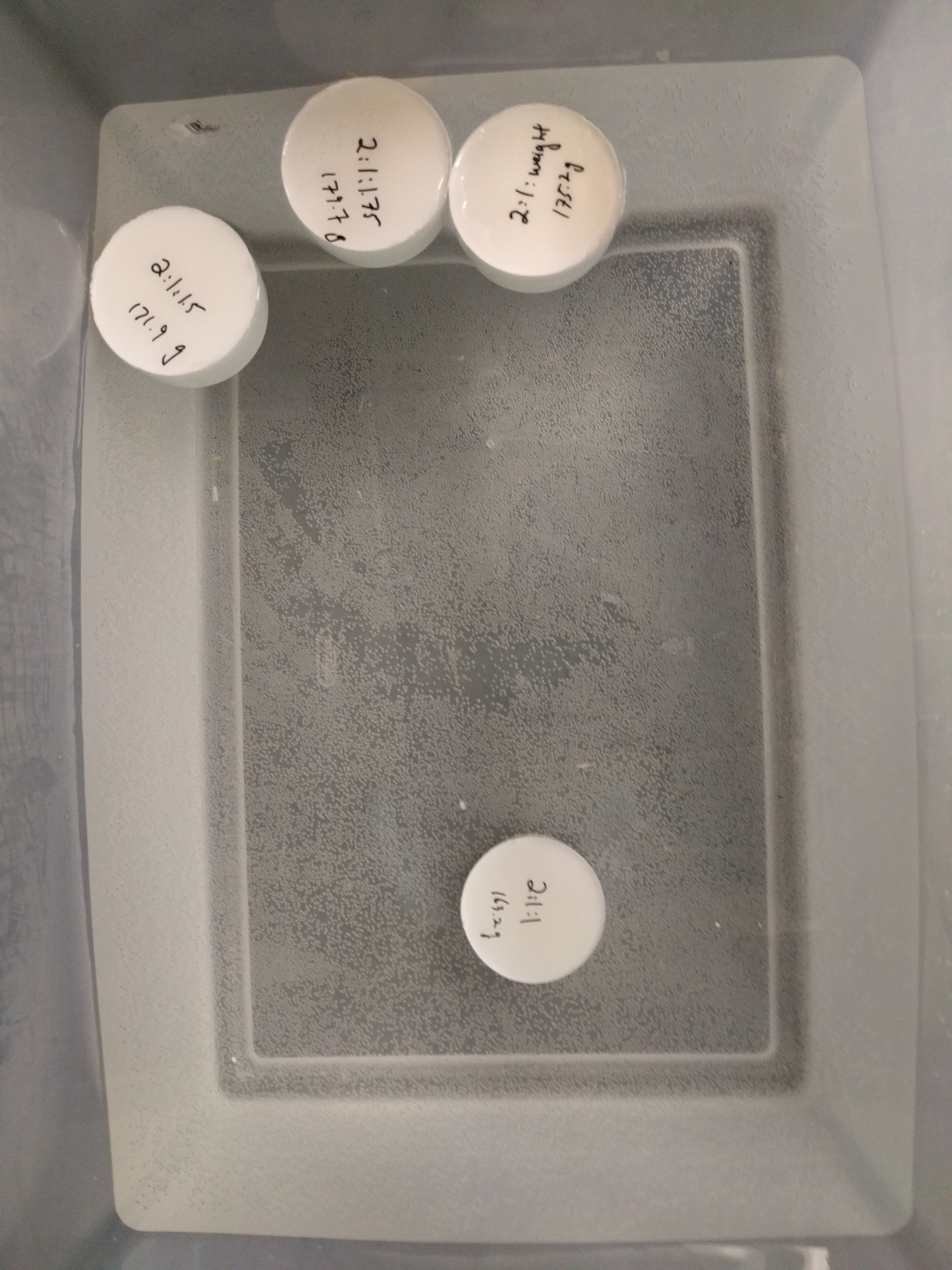


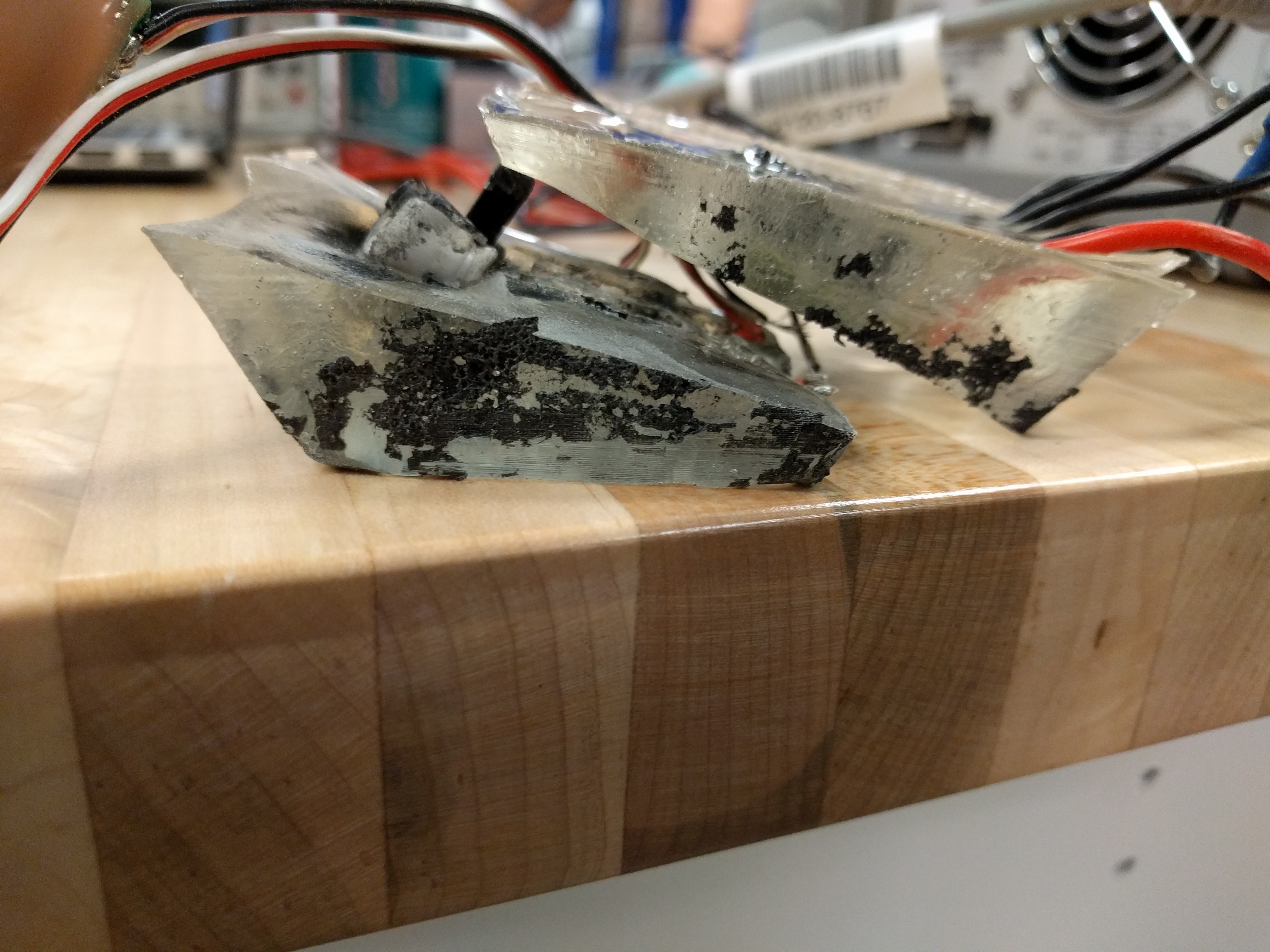

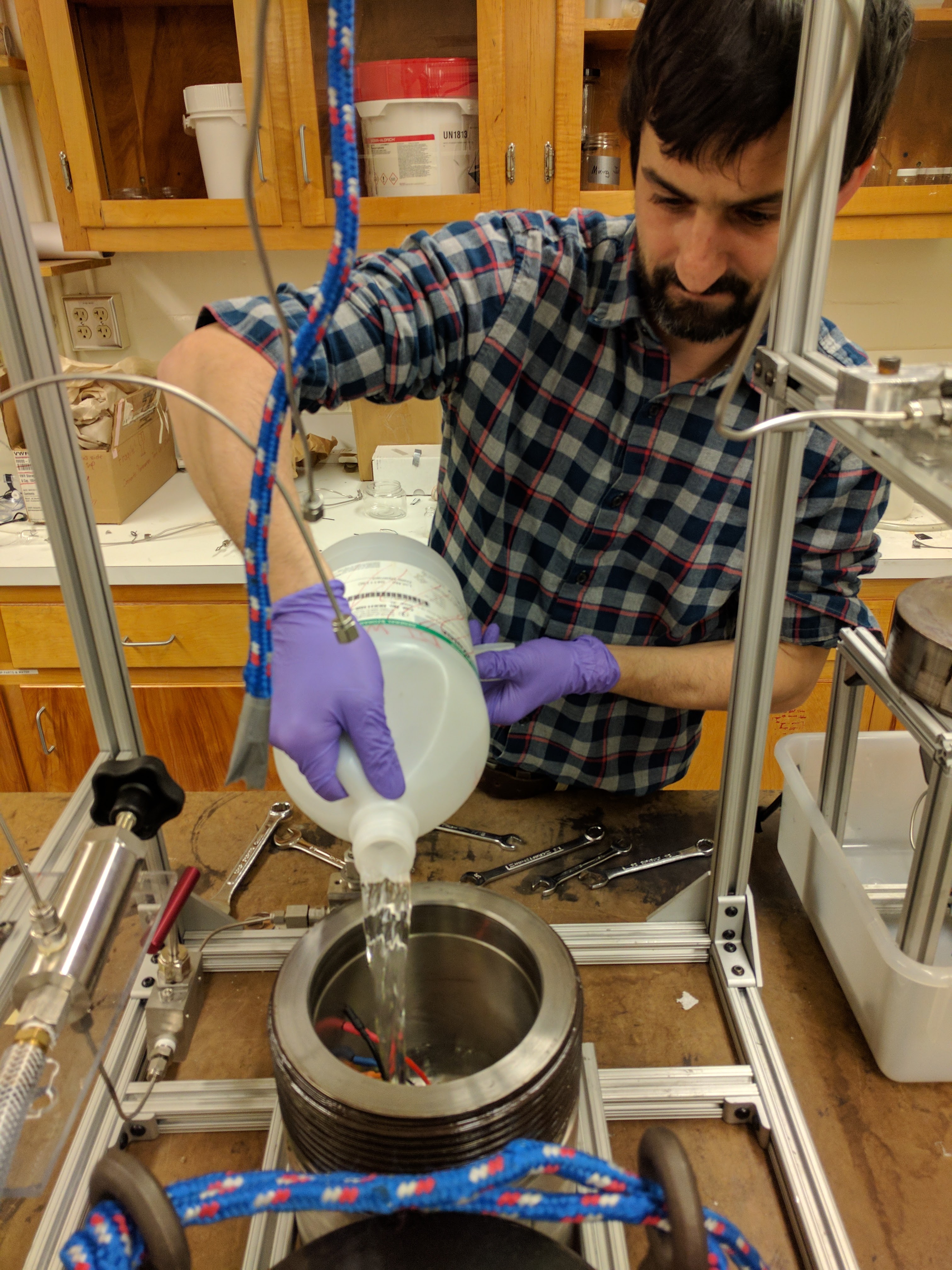
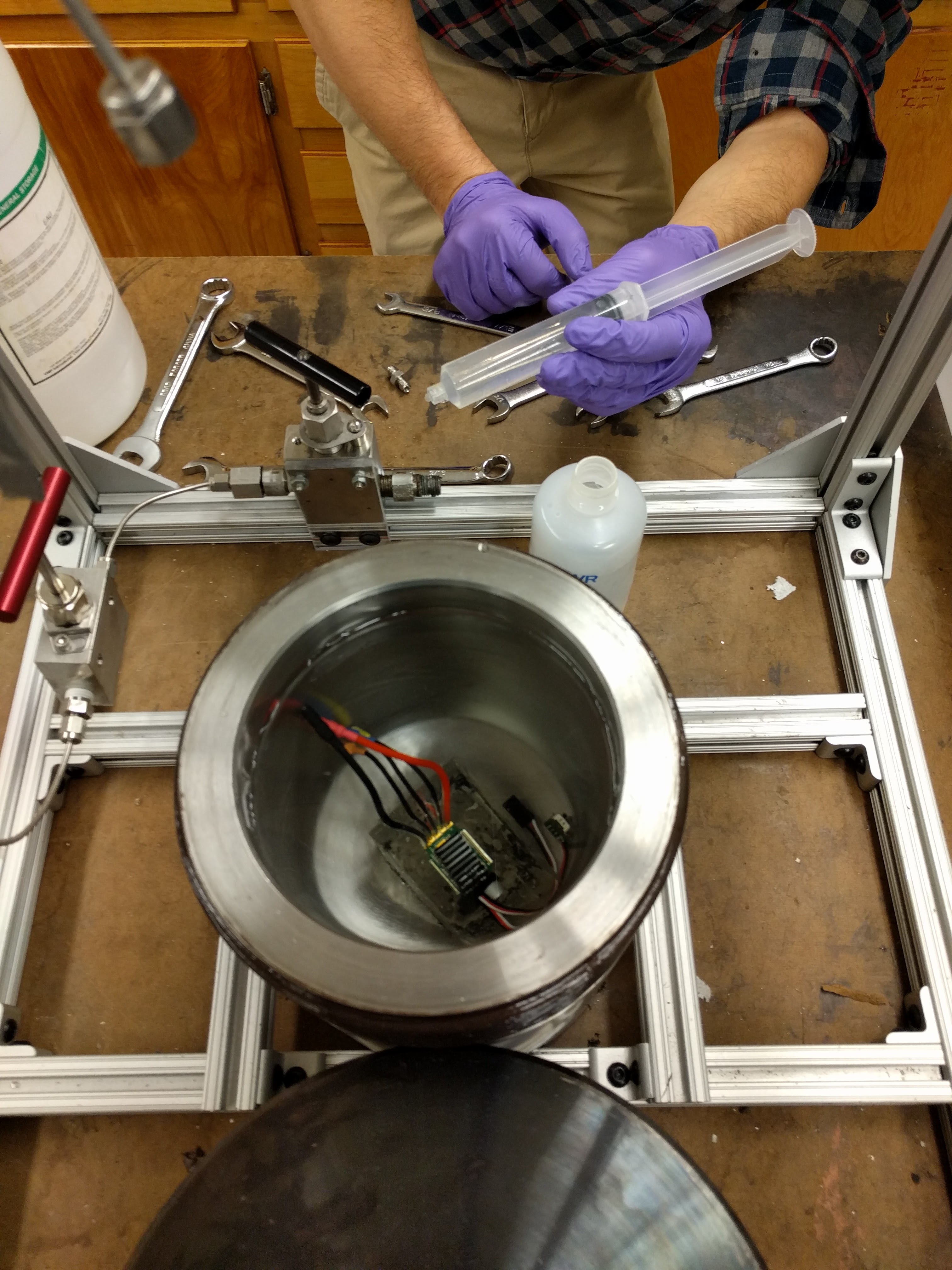
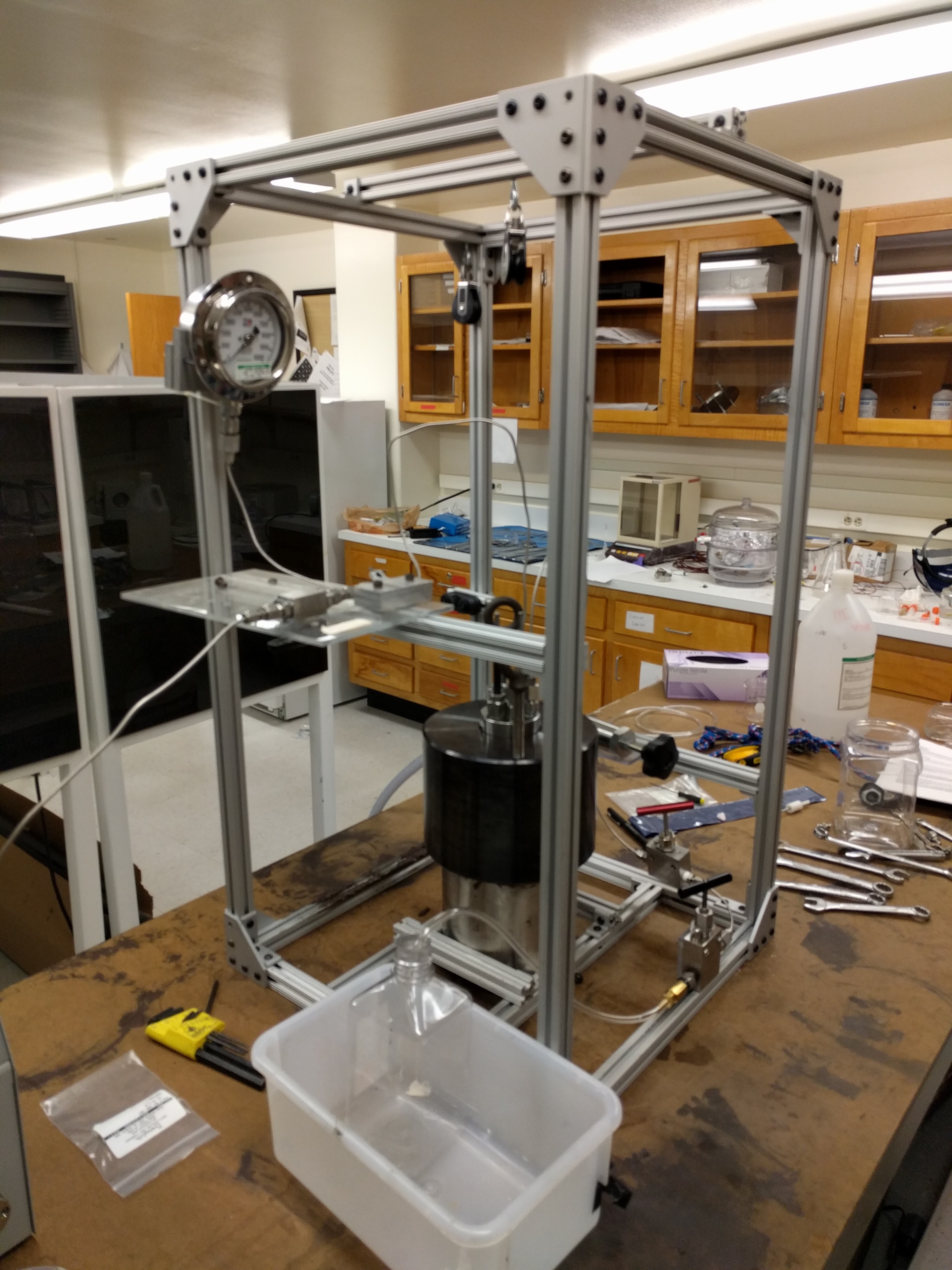
Molds, Curing, and Electronic Module Testing at 3000 psi


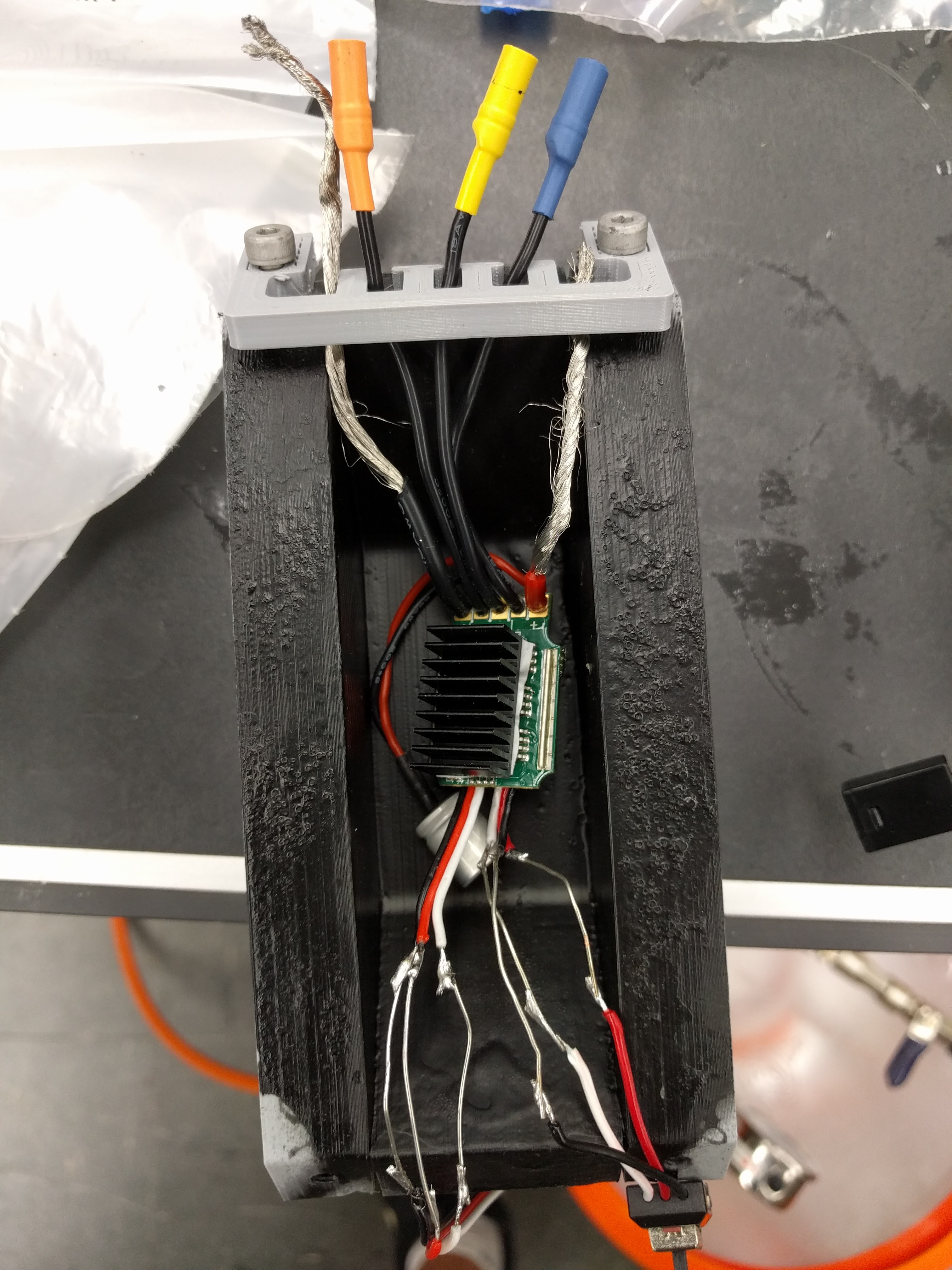






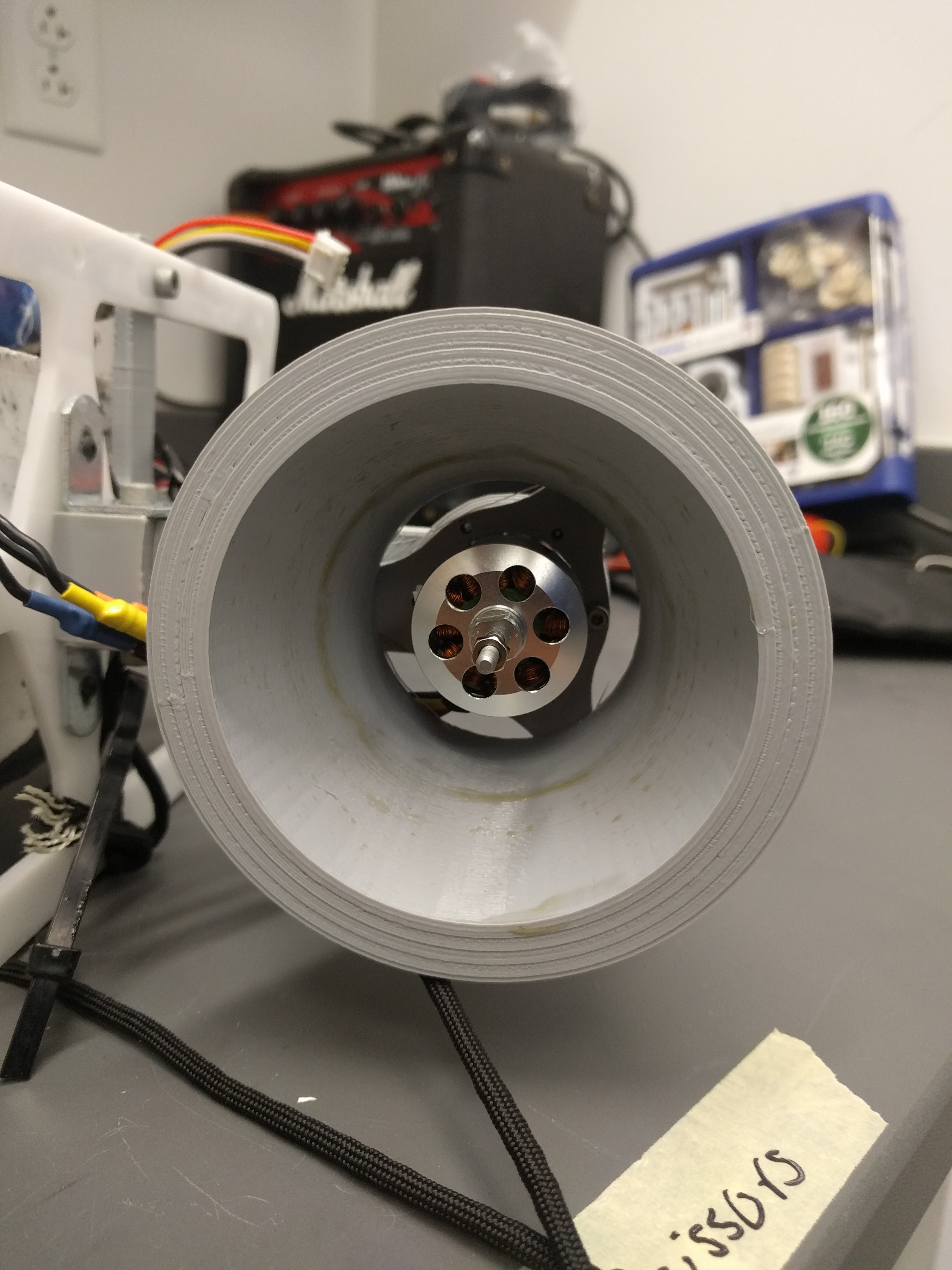



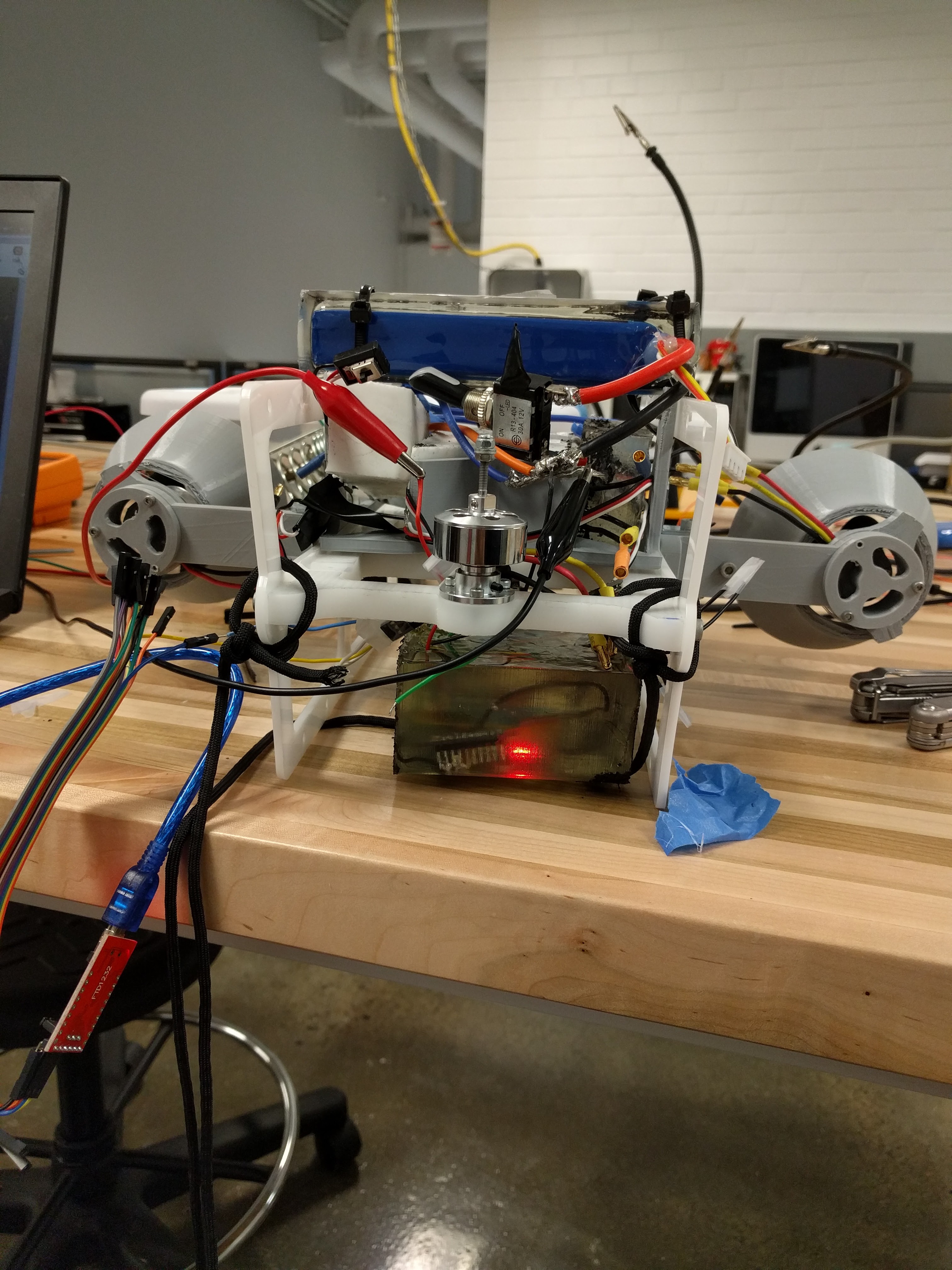
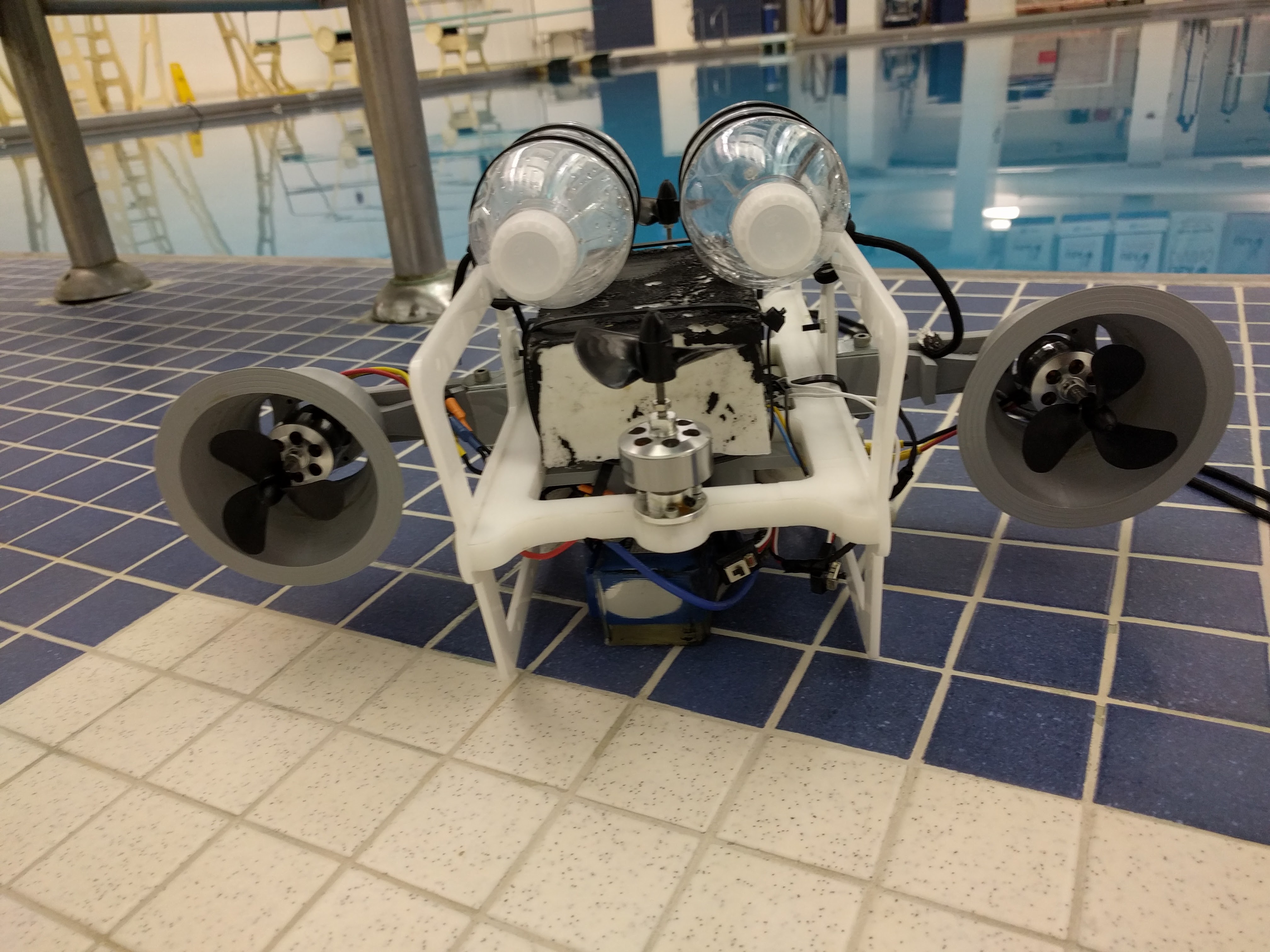
Final Architecture and Vehicle Pool Test




Competition Sponsors
Department Sponsors
